Download
1 / 1
10 likes | 252 Views
μ=o. μ=0.8. μ=0.6. Relating Robot Parameters to Laceration and Contusion Injuries via Contact Mechanics. Samson Phan & Mark Cutkosky. Introduction Robots are becoming increasingly common in environments where interactions with humans will be commonplace.

E N D
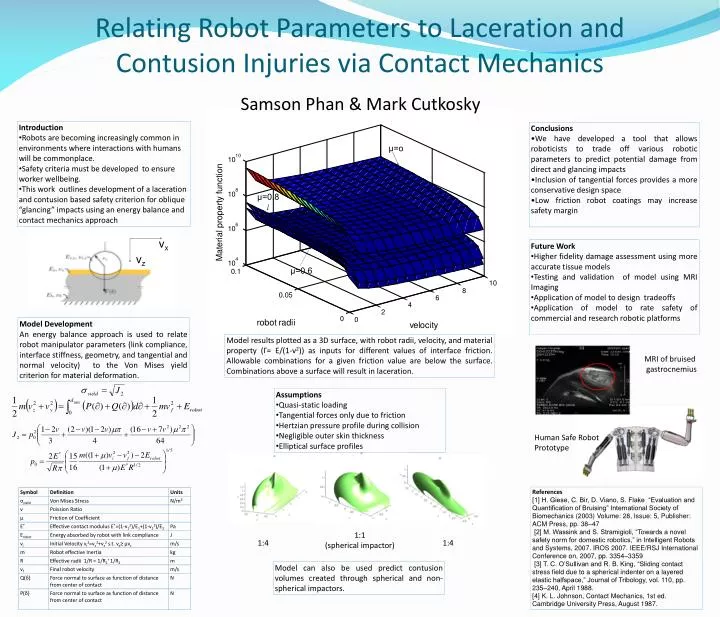
μ=o μ=0.8 μ=0.6 Relating Robot Parameters to Laceration and Contusion Injuries via Contact Mechanics Samson Phan & Mark Cutkosky • Introduction • Robots are becoming increasingly common in environments where interactions with humans will be commonplace. • Safety criteria must be developed to ensure worker wellbeing. • This work outlines development of a laceration and contusion based safety criterion for oblique “glancing” impacts using an energy balance and contact mechanics approach • Conclusions • We have developed a tool that allows roboticists to trade off various robotic parameters to predict potential damage from direct and glancing impacts • Inclusion of tangential forces provides a more conservative design space • Low friction robot coatings may increase safety margin vx • Future Work • Higher fidelity damage assessment using more accurate tissue models • Testing and validation of model using MRI Imaging • Application of model to design tradeoffs • Application of model to rate safety of commercial and research robotic platforms vz Model Development An energy balance approach is used to relate robot manipulator parameters (link compliance, interface stiffness, geometry, and tangential and normal velocity) to the Von Mises yield criterion for material deformation. Model results plotted as a 3D surface, with robot radii, velocity, and material property (Γ= E/(1-v2)) as inputs for different values of interface friction. Allowable combinations for a given friction value are below the surface. Combinations above a surface will result in laceration. MRI of bruised gastrocnemius • Assumptions • Quasi-static loading • Tangential forces only due to friction • Hertzian pressure profile during collision • Negligible outer skin thickness • Elliptical surface profiles Human Safe Robot Prototype References [1] H. Giese, C. Bir, D. Viano, S. Flake “Evaluation and Quantification of Bruising” International Society of Biomechanics (2003) Volume: 28, Issue: 5, Publisher: ACM Press, pp. 38–47 [2] M. Wassink and S. Stramigioli, “Towards a novel safety norm for domestic robotics,” in Intelligent Robots and Systems, 2007. IROS 2007. IEEE/RSJ International Conference on, 2007, pp. 3354–3359 [3] T. C. O’Sullivan and R. B. King, “Sliding contact stress field due to a spherical indenter on a layered elastic halfspace,” Journal of Tribology, vol. 110, pp. 235–240, April 1988. [4] K. L. Johnson, Contact Mechanics, 1st ed. Cambridge University Press, August 1987. 1:1 (spherical impactor) 1:4 1:4 Model can also be used predict contusion volumes created through spherical and non-spherical impactors.