Download
1 / 17
170 likes | 310 Views
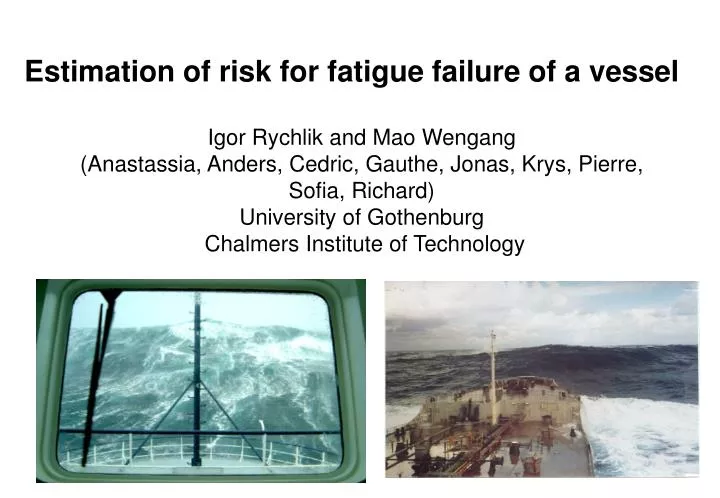
Estimation of risk for fatigue failure of a vessel. Igor Rychlik and Mao Wengang (Anastassia, Anders, Cedric, Gauthe, Jonas, Krys, Pierre, Sofia, Richard) University of Gothenburg Chalmers Institute of Technology. Cracks observed after one year of exploitation.

E N D
Estimation of risk for fatigue failure of a vessel Igor Rychlik and Mao Wengang (Anastassia, Anders, Cedric, Gauthe, Jonas, Krys, Pierre, Sofia, Richard) University of Gothenburg Chalmers Institute of Technology
Cracks observed after one year of exploitation. • Ship fatigue maintenance/repair costs are considerable. • It is serious problem hence measuring campaign is ongoing, data analysis, modeling, hopefully leading to improvements.
Plan: • We define safety index and motivate its use as a measure • of the risk for excessive fatigue damages. • 2) We discuss computational aspects of the index when • different sources of information are available: • a) measured stresses, • b) measured encountered sea states, • c) shipping route, time, average vessels velocity, • d) only the shipping period is specified, e.g. 5 years. • We employ statistical methods, models discussed earlier on this • workshop: Pär, Jacques, Thomas (load, strength, safety indexes…) • Anastassia, Krys (space, time models for significant wave height).
S-N data – strength tests: For a stationary Gaussian stress ln(N) = a – k*ln(Seq) + e (0) e - error N – number of cycles to failure Seq – equivalent stress range k – a constant, k≈3 For a non stationary Gaussian stress x(t), 0<t<T, Eq. (0) and Palmgren - Miner rule implies that ”x(t) is safe” if - a + ln (D(T)) + e < 0, (1) where D(T) = ∑ Si^k and Si the ranges of rainflow cycles.
Safety Index - definition: A stress x is ”safe” for fatigue if for some r.v. G>0 and “unsafe” if G<0, then define I = E[G] / std[G] to be a safety index for fatigue failure. Properties: - G is not uniquely defined. - if G ≈ Normal then Pf ≈ Φ( - I ). * * * Motivated by (1) we choose G(T) = a - ln(D(T)) + e + e1 + e2 + e3 + … , ei are different types of uncertainties/ errors. For the wave loads ln(D(T)) is approx. normally distributed.
Safety index - estimation ∆Dj - nominal damage accumulated during jth voyage I = E[G(T)] /std[G(T)], where G(T) = a - ln(∑Δj) + errors. Using Gauss approximation formulas E[G(T)] ≈ E[a] - ln(∑ E[∆Dj]) V[ G(T)] ≈ V[a] + CoV(∑ ∆Dj)^2 + V[e] + V[e1] + … - if measured stresses are used then (practically) V[∆Dj]≈ 0, - if one knows the voyages i,j , i.e. routes and schedules, then ∆Di, ∆Dj are independent, hence CoV(∑ ∆Dj)^2 = ∑ V[∆Dj] / (∑ E[∆Dj])^2 (2) * * * Example: If no damage was accumulated before the monitored voyages then E[G] ≈ 29.4 - 25.9, V[G] ≈ 0.01 + 0 + 0.14 + 0.01 + 0.01 + …, I≈8.4
Extrapolation to more voyages: Problem: suppose one is planning to sail similar routes during the next 2 years, 26 in winter, 32 in summer and 32 in spring/fall and wishes to update the index I. We need to estimate E[G] and V[G]. This can be done by means of statistics: Using observed damages for 4 winter passages, 2 summer and 3 spring /fall , one can estimate ∑ E[∆Dj] and CoV(∑ ∆Dj)^2 by estimating average damage and its variance for the 3 seasons. The estimates are: E[∆Dj] ≈ 10^10 * [3.17 0.73 1.34] V[∆Dj)] ≈ 10^20 * [3.59 0.11 0.67] Hence, neglecting statistical errors, by (2), I ≈ 1.76/sqrt(0.175) = 3.0, (CoV(∑ ∆Dj)^2=0.005 ) Ship is not safe enough to sail in the following 2 years.
Computation of index when only encountered sea states are known Based on analysis of measured stresses during 9 voyages we propose to model the accumulated damage during a voyage by ∆D ≈ C* ∑ Di where Di = fzi*Hi^3 *dt Di - damage increment during ith encountered stat. period dt Hi,fzi - significant wave height, frequency of encountered waves based on measured spectrum C - constant, varies between voyages. In the data C is bounded by 4000. * * * Further simplifications give that accumulated damage during a voyage ∆D ≤ ≈ c1*∑ Hi^2.5 + c2*∑ Hi^2 (3)
Example cont. measured damage ∆D, estimated ∆D by means of Eq. (3) 1.0e+010 * 0.3428 3.8662 4.6215 5.4973 0.8243 4.8378 3.2376 4.7253 2.5703 2.6929 1.4031 1.4691 1.5660 1.9712 0.4450 0.7083 0.8623 0.9285 +_____________ 1.0e+011 * 1.5873 2.6697 Using (3) and the measured sea state, the index I after 9 voyages is I ≈ 3.1/sqrt(0.17) ≈ 7.5. Obs. variance of G is unchanged because we overestimated the observed damages.
Estimation of safety index: 1. If shipping routes are changed and one is not measuring stresses or Hi? (One can use (3) if a model of time variability of Hi over the oceans is available and radar measurements of Hi are reliable. This problem is over investigation. 2. If the future shipping routes are uncertain / design stage? Here, in addition to 1. (as in the case of car industry) one needs to model the shipping, e.g. variability routes, captains, loading etc. Not considered in the project.
Examples of tests already performed: 1.0e+010 * 0.34 [0., 2.71] 4.62 [0.44, 7.82] 0.82 [0., 9.43] 3.24 [0.11, 6.91] 2.57 [0.58, 6.77] 1.40 [0., 2.72] 1.57 [0.25 , 2.46] 0.45 [0.13, 0.88] 0.86 [0.08, 0.70] Variance for damage accumulated during the 9 voyages, based on the model, is 10.9 * 10^20 while the variance estimated from the data is 16.6 * 10^20 .
Modeling Hi at fixed location Hi are log-normally distributed, i.e. ln Hi - N(m(t),s^2)
Hi - modelestimatedfromsatellitemeasurements CALL: xn = load('gfaksr89.dat') Median in February Median in August Variance of ln(Hi)
In order to compute the variance of ∆D we need the space and time correlation of significant wave heights H(x,y;t).
Plans for future: Find a method for route planning that ”minimizes” the damage