Download
1 / 42
430 likes | 986 Views
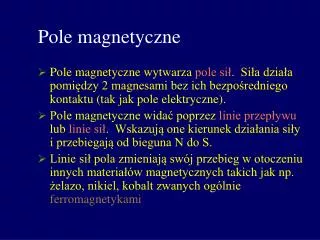
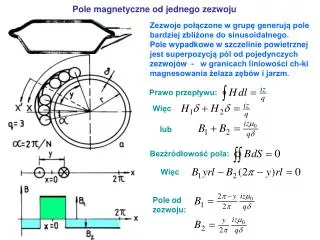
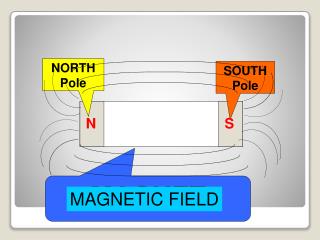
Pole magnetyczne od jednego zezwoju. Zezwoje połączone w grupę generują pole bardziej zbliżone do sinusoidalnego. Pole wypadkowe w szczelinie powietrznej jest superpozycją pól od pojedynczych zezwojów - w granicach liniowości ch-ki magnesowania żelaza zębów i jarzm. Prawo przepływu:.

E N D
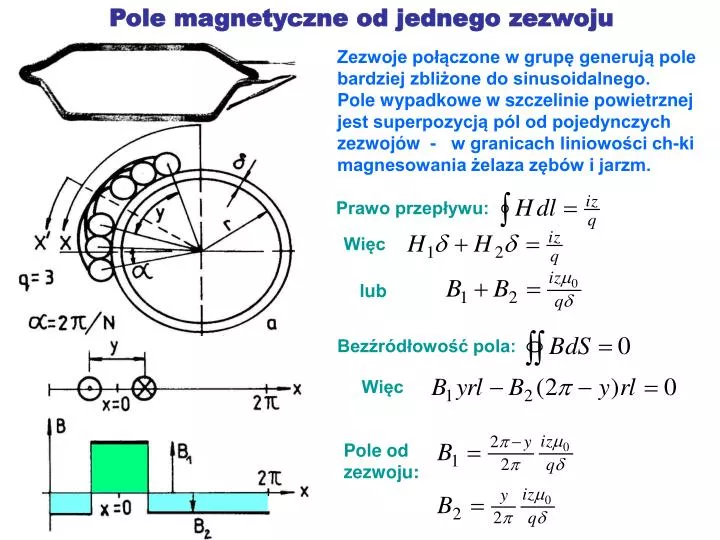
Pole magnetyczne od jednego zezwoju Zezwoje połączone w grupę generują pole bardziej zbliżone do sinusoidalnego. Pole wypadkowe w szczelinie powietrznej jest superpozycją pól od pojedynczych zezwojów - w granicach liniowości ch-ki magnesowania żelaza zębów i jarzm. Prawo przepływu: Więc lub Bezźródłowość pola: Więc Pole od zezwoju:
Pole magnetyczne od grupy zezwojów Przy założeniu monoharmoniczności pola, uwzględniamy tylko 1-szą albo podstawową (p-tą) harmoniczną. Pole od podanego wcześniej zezwoju można zapisać: przy czym: Pole wypadkowa grupy zezwojów: przy czym współczynnik uzwojenia, będący iloczynem współczynników skrótu i grupy, wynosi:
Sprowadzenie, przeliczenie uzwojenia wirnika na stronę stojana1 Przekładnia zwojowa Indukcyjności główne Dla pola monoharmonicznego, indukcyjność główna stojana wynosi:
Sprowadzenie, przeliczenie uzwojenia wirnika na stronę stojana2 Indukcyjność główna wirnika: Indukcyjność wzajemna stojan-wirnik: Równania dla jednego zezwoju na stojanie i jednego na wirniku: lub w zapisie macierzowym: W równaniach sprowadzonych, tu na stronę stojana, indukcyjności w macierzy sprzęgającej stojan i wirnik mają wspólną amplitudę M.
Maszyna indukcyjna albo asynchroniczna - budowa Trójfazowy silnik indukcyjny klatkowy, zasilany bezpośrednio z sieci, jest podstawowym napędem w przemyśle. Zwykle klatka jest aluminiowa, odlewana. Przy większych mocach klatka jest lutowana z prętów miedzianych lub mosiężnych. Kadłub jest użebrowany aby polepszyć chłodzenie, realizowane przez wentylator. Jeśli proces technologiczny wymaga zmiennej prędkości obrotowej, to silnik zasilamy ze statycznego przekształtnika częstotliwości, zamieniającego napięcie o f =50 Hz na f = var. Przekształtnik statyczny bazuje na elementach energoelektronicznych (tyrystor GTO, IGBT, często zintegrowane do IPM = Integrated Power Module). Cena zasilacza >= cena silnika.
Silnik indukcyjny klatkowy - budowa Całość klatki aluminiowej jest odlewana, cast cage. Nawet do 300 kW. Są trwałe, robust. Klatki większych silników są prętowane, fabricated cage. Wbite pręty są lutowane, lutowie twarde z dodatkiem srebra, do pierścieni zwierających.
Silnik indukcyjny pierścieniowy, pierścienie + szczotki Uzwojenie wirnika pierścieniowego wykonuje się z cewek, tak jak uzwojenie stojana. Dostęp do uzwojeń wirnika zapewniają pierścienie ślizgowe. Niekiedy silnik posiada zwieracz, który również unosi szczotki po wykonaniu rozruchu.
Maszyna indukcyjna albo asynchroniczna – równania gdzie Macierze rezystancji są diagonalne:
Macierze indukcyjności są cykliczne Indukcyjności główne Indukcyjności rozproszenia Macierz transformacyjna do składowych symetrycznych: przy czym:
Transformacja równań do składowych symetrycznych Po wykonaniu mnożeń macierzy, otrzymujemy: Przy czym:
Równania w składowych symetrycznych Składowe zerowe są rzeczywiste. Ich równania są niezależne. Z postaci macierzy S wynika, że składowe 2-gie są sprzężone do 1-szych. Zatem wystarczy obliczać tylko składowe 1-sze. Równania składowych 1-szych stojana i wirnika tworzą parę: Składowe symetryczne stojana ilustrujemy wektorami na płaszczyźnie zespolonej, której oś rzeczywista pokrywa się z osią symetrii pierwszej fazy stojana. Składowe symetryczne wirnika przedstawiamy na płaszczyźnie wirującej razem z wirnikiem. Tzw. wektory przestrzenne wyrażone są w nowym, wspólnym układzie odniesienia.
Równania z wektorami przestrzennymi Składowe symetryczne 1-sze wyrazimy poprzez tzw. wektory przestrzenne: k – jest identyfikatorem układu odniesienia dla wektorów przestrzennych. jk – jest aktualnym kątem położenia k-tego układu odniesienia. Analogicznie definiuje się wektory przestrzenne napięć. W równaniach, składowe symetryczne wyrażamy poprzez wektory przestrzenne. Definiujemy wektory przestrzenne strumieni sprzężonych: Otrzymujemy:
Schemat zastępczy z wektorami przestrzennymi Schemat ten wiruje z prędkością kątową wk układu odniesienia dla wektorów przestrzennych. Schemat ten odnosi się do stanów dynamicznych. Dotyczy modelu monoharmonicznego. Schemat jest ilustracją równań. Współczynnik rozproszenia całkowitego: W wyrażeniu na moment elektromagnetyczny prądy rzeczywiste zastępujemy wektorami przestrzennymi:
Stan ustalony przy zasilaniu symetrycznym i stałej prędkości Wektor przestrzenny napięć zasilających w układzie synchronicznym: Jest to wektor stały. Równania różniczkowe wektorowe są liniowe. W układzie synchronicznym, w stanie ustalonym, wektory prądów, i w konsekwencji też wektory strumieni sprzężonych, będą stałe. W równaniach znikają więc pochodne strumieni sprzężonych. W tym stanie maszyna opisywana jest równaniami algebraicznymi: lub Uwzględniając definicje strumieni sprzężonych otrzymujemy: Poślizg: czyli
Schemat zastępczy w stanie ustalonym, przy zasilaniu symetrycznym i stałej prędkości 10 1 1000 100 Wirnik sprowadzony na stronę stojana == widziany od strony stojana == rotor referred to stator. Straty w stojanie są +- takie same jak straty w wirniku RS +- = RR. Reaktancje rozproszenia stojana i wirnika są +- równe: . Przy poślizgu zerowym, obwód wirnika ulega otwarciu: prąd wirnika jest zerowy. Jest to idealny bieg jałowy. Przy zablokowaniu wirnika poślizg wynosi jeden. Cała moc idzie na straty. Parametry względne są +- jak 1: 10: 100: 1000. Parametry poprzeczne są wielokrotnie większe od podłużnych możliwość identyfikacji parametrów z pomiaru biegu jałowego i przy zablokowanym wirniku.
Moment w stanie ustalonym, charakterystyka Klossa W maszynach o mocach powyżej 4 kW, wpływ rezystancji stojana jest niewielki. Przyjmujemy RS = 0. Ze schematu obliczamy prądy stojana i wirnika. Podstawiamy obliczone prądy do wzoru na moment. Otrzymujemy: Wzór Klossa, gdzie oraz poślizg krytyczny. Zwiększanie RR powiększa poślizg krytyczny. Mement krytyczny Tk pozostaje stały. Regenerating Hamowanie przeciwprądem Silnik Driving Plugging Generator
Momenty pasożytnicze Niesinusoidalność rozkładu pola magnetycznego jest źródłem fal pola magnetycznego w szczelinie powietrznej o większej od p liczbie par biegunów. Fala o liczbie par biegunów 7p wiruje do przodu, a o 5p do tyłu, czyli przeciwnie do kierunku wirowania wirnika. Fale te indukują w wirniku prądy, co skutkuje powiększonymi stratami i deformacją charakterystyki momentu: ”siodła” od momentów asynchronicznych i ”szpilki” od momentów synchronicznych.
Moment w stanie dynamicznym, rozruch Po załączeniu maszyny prądy stojana i wirnika zawierają składowe oscylacyjne i aperiodyczne. Oddziaływanie składowej oscylacyjnej prądów stojana ze składową aperiodyczną prądów wirnika generuje składową oscylacyjną momentu. Początkowo, gdy wirnik prawie stoi, częstotliwość składowej oscylacyjnej momentu wynosi f sieci, czyli 50 lub 60 Hz. Po zaniku składowej aperiodycznej w prądach wirnika, znika składowa oscylacyjna momentu.
Moment w dynamiczny, rozruch silnika dużej mocy Czas rozruchu silników o mocy rzędu 400 kW, napędzających wentylatory o dużych bezwładnościach, dochodzi do 40s. Wirniki ulegają przegrzaniu do 400o. Trajektoria momentu dynamicznego przechodzi poniżej statycznego momentu krytycznego. Dochodzeniu do stanu ustalonego towarzyszą kołysania prędkości. Moment rozruchowy jest niewielki.
Rozruch i sterowanie prędkości silnika indukcyjnego Prędkość synchroniczna w obr. / min. == r.p.m.: Straty mocy w wirniku: Moc pola wirującego, przenoszona na wirnik Tylko praca z małym poślizgiem zagwarantuje małe straty. Mały musi więc być poślizg krytyczny, co wymaga małej rezystancji wirnika. Jednak mała rezystancja wirnika skutkuje małym momentem rozruchowym. Aby go podnieść trzeba zmaksymalizować efekt wypierania prądu, poprzez trapezoidalny przekrój prętów lub zastosowanie podwójnej klatki. W silnikach pierścieniowych dołączamy do wirnika rezystory rozruchowe. Prędkość można sterować zmieniając liczbę par biegunów p. Stojan wyposaża się w dwa uzwojenia, o różnych p. Klatkowy wirnik automatycznie odpowie polem o takiej samej liczbie biegunów. Zmiana częstotliwości zasilania f zmienia prędkość synchroniczną nS. Zmienia to prędkość obrotową, zachowując mały poślizg i małe straty. Zmiennego f dostarczają przetwornice częstotliwości: - elektromaszynowe – stare, - statyczne, czyli falowniki energoelektroniczne – nowe.
Żłobki i pręty silnika indukcyjnego Żłobki stojanów silników wysokiego napięcia, 6.3kV, są otwarte. Żłobki zamknięte stosuje się rzadko bo powiększają rozproszenie, ale silnik jest cichszy.
Wypieranie prądu w prętach klatki wirnika Pręt dzielimy na fikcyjne warstwy równoległe. Indukcyjności rozproszenia warstw górnych są małe a dolnych duże. Przy dużych poślizgach częstotliwość prądów wirnika jest duża: fR=s*fS reaktancje warstw duże. Reaktancje decydują o rozkładzie prądów na warstwy. Prądy płyną warstwami górnymi o dużym R Zwiększa się moment rozruchowy. Przy małych poślizgach prąd płynie całym przekrojem małe R mały SK małe DP. Wirnik 2-klatkowy: Pręty górne z mosiądzu, dolne z Cu:g=14 i 56 MS/m. Rozruch: Prądy głównie w klatce górnej o dużym R duży moment rozruchowy.
Elektromaszynowa przetwornica częstotliwości Napęd samotokowy do transportu wlewków lub blach w walcowni, zawiera dziesiątki silników, z których wszystkie winny się kręcić z tą samą, regulowaną, prędkością. Osiąga się to przez zasilanie ze wspólnej, wydzielonej, sieci. Sieć tę zasila się z generatora synchronicznego z regulowaną prędkością. Utrzymywanie U/f = const gwarantuje zachowanie stałego momentu krytycznego silników asynchronicznych. Silnik synchroniczny spełnia 2 funkcje: - napędza generator prądu stałego – funkcja podstawowa, - generuje moc bierną – funkcja dodatkowa – tak aby cosf Huty był bliski = 1.
Wyłączanie tyrystora • Tyrystor może się znajdować w 3 stanach: • zaporowym, UAK<0. • blokowania, UAK>0. • przewodzenia, jeśli przy UAK>0 podamy impuls na bramkę czyli na Gate. • Jeśli stan bezprądowy trwa dłużej niż 150ms to tyrystor przechodzi do blokowania. • Tyrystor załączamy po uprzednim przygotowaniu warunków do zaniku prądu. Tyrystor wymaga złożonego układu komutacyjnego. Jest wypierany przez wyłączalny IGBT. Zmiana czasów zał/wył zmienia średnią intensywność transferu energii
Straty łączeniowe Prostokąt wyznaczony przez aktualny punkt pracy jest miarą aktualnych strat w łączniku, np. w tranzystorze mocy. Tylko Straty w punktach On i Off są niewielkie. Elementy energoelektroniczne mogą więc pracować tylko w reżimach full On, full Off. Każdemu przejściu z punktu On do Off, i vice versa, towarzyszą duże straty łączeniowe. Stąd ograniczenie na częstotliwość przełączeń łączników mocy. Przejście On/Off odbywać się może według 3 charakterystyk. Najmniejsze straty zapewniają układy z wyłączaniem rezonansowym.
IGBT – ochrona przed przepięciami Tranzystor IGBT może pracować w stanie blokowania i przewodzenia. Przed stanem zaporowym chroni go dioda antyrównoległa. Przed przepięciami łączeniowymi chroni go układ R+C+D lub ogranicznik przepięć, snubber. Zwarciom towarzyszą duże prądy Izw, niszczące IGBT. Bezpieczniki szybkie są i tak za wolne. Ochronę tworzy elektronika generująca impuls wyłączający gdy UCE osiągnie 6V. Szeregowe L ogranicza szybkość wzrostu Izw, tak aby IGBT zdążył wyłączyć zanim zostanie zniszczony.
Układ regulacji napięcia - softstart Większy kąt opóźnienia zapłonu względem napięcia przechodzącego przez zero, skutkuje mniejszym prądem Zastosowanie: Softstart realizowany zwykle na triakach czyli antyrównoległych Tyrystorach.
Kaskada podsynchroniczna we wirniku obniża obroty Vo musi być <0. Część energii przeniesionej polem do wirnika idzie nie na wał ale z powrotem do sieci obroty maleją. Łączniki należy sterować tak aby nie powstało zwarcie. Minimalny kąt wysterowania alfa= 90o. Wtedy, jak na rys., wirnik nie oddaje żadnej energii. Zwiększenie alfa obniży obroty.
Napęd z regulowaną prędkością Variable Speed Drive Moc, właściwie energia, pobierana jest z sieci o napięciu 3-fazowym sinusoidalnym. Przemiennik częstotliwości zamienia ją na moc o fwy= var, ale tak aby U/f = const. Gwarantuje to pracę ze znamionowym strumieniem, co z kolei zapewnia Tkr= const, dla każdej fwy.
Prostownik + falownik Rctifier + Inverter Prostownik jest niesterowany, czyli ma formę mostka diodowego. Falownik pracuje w trybie PWM. Tryb ten zapewnia nastawianie częstotliwości i amplitudy napięcia wyjściowego. Współczesne falowniki pracują w oparciu o IGBTs, najczęściej w modułach po trzy sztuki, wraz z diodami zwrotnymi. Kondensator zapewnia stałość napięcia w obwodzie pośredniczącym.
IGBT Power Module IGBT jest elementem sterowanym napięciem. W czasie pracy ustalonej bramka sterująca nie pobiera mocy. Prąd bramki płynie tylko w czasie załączania lub wyłączania. Jest to prąd ładowania lub rozładowania pojemności pasożytniczych. Wadą IGBT jest duży spadek napięcia w kierunku przewodzenia: 3V. Przy 100 amperach generuje to 300 watów strat w każdym elemencie. Z modułu z 3 IGBT trzeba więc wyprowadzać 900 W strat. Spadek ten dla tyrystora i diody mocy wynosi 1.5V.
Mostek prostowniczy sterowany - schemat S= switch. L= load R, Y, B = Red, Yellow, Blue. W Europie: czerwony, fiololetowy, niebieski - kolory oznaczenia faz. VR, VY, VB = napięcia zasilania, zwykle napięcia strony wtórnej transformatora. Zawsze przewodzi ta para faz zasilających, która wykazuje w danym momencie największą różnicę napięć fazowych. Ta para faz dostarcza w danym momencie największego napięcia międzyprzewodowego, stanowiącego napięcie wyjściowe, podawane na R+ L+ E, reprezentujące obwód pośredniczący.
Prądy i napięcia mostka prostowniczego Mostek diodowy odpowiada pracy z kątem opóźnienia zapłonu alfa= 0. Kąt alfa= 60o obniża wartość średnią napięcia wyjściowego. Kąt alfa= 140o skutkuje ujemnym napięciem wyjściowym.
Napięcie wyjściowe falownika Zębata fala nośna jest porównywana z falami modulującymi dla każdej fazy. Podstawowa harmonika napięcia międzyfazowego ma częstotliwość taką jak fala modulująca. Porównywanie fal jest mało Dokładne. Obecnie stosuje się SPACE VECTOR MODULATION. Filtracja dolnoprzepustowa od indukcyjności silnika usuwa wyższe harmoniczne z prądów.
Napięcie wyjściowe falownika w trybie zwykłym Jeśli prostownik sterowany zapewnia dopasowanie U/f = const to falownik może pracować z niską częstotliwością. Układ tez został wyparty przez PWM, w którym część falownikowa spełnia obydwie funkcje. Układ PWM + układ nadzoru prędkości:
Falownik prądu W układach dużych mocy pracujących ze zwrotem energii ekonomiczne jest stosowanie falowników prądu. W gałęziach falownika prądu prądy płyną zawsze w jednym kierunku. Przy zwrocie energii zmienia się biegunowość napięcia w obwodzie pośredniczącym. Rolą dławika jest oddzielenie procesów komutacyjnych w falowniku i sterowanym prostowniku. Prostownik wymusza wielkość prądu w obwodzie pośredniczącym, a więc i w silniku. Dławik zapobiega zmianom tego prądu przez procesy komutacyjne.
Falownik prądu - komutacja Załóżmy, że prąd płynie przez Q1, D1, A, C, D2, Q2. Załóżmy, że C1 jest naładowany jak na rysunku. Podajemy impuls na Q3. Q1 zostaje zablokowany przez Uc1. Prąd przejmuje Q3. Ładuje on C1 w odwrotnym kierunku. Gdy VA + Uc1 zrówna się z UB, prąd przejmie dioda D3 i faza B. Przestaje płynąć prąd w fazie A. Nastąpiło skomutowanie prądu fazy A na fazę B: autosequential commutation. Kondensatory wymagają wstępnego naładowania. W trakcie pracy kondensatory automatycznie się ładują do odpowiednich biegunowości.
Cyklokonwerter 1-fazowy Naprzemienne wysterowywanie mostka lewego i prawego wymusi przepływ prądu w odbiorniku w naprzemiennym kierunku. Podstawowa harmonika tego prądu będzie sinusoidą o niskiej częstotliwości.
Cyklokonwerter 1-fazowy: napięcie wyjściowe Napięcia chwilowe obu prostowników nie są jednakowe. Należy załączać albo jeden mostek albo drugi, lub zastosować dławik wyrównujący chwilowe różnice napięć.
Cyklokonwerter 3-fazowy pełnofalowy Cyklokonwertery znajdują zastosowanie tylko w napędach największych mocy.
Cyklokonwerter 3-fazowy + transformator wielouzwojeniowy Zasilanie każdej fazy z innego uzwojenia transformatora zapobiega powstawaniu zwarć pomiędzy mostami.