Download
1 / 8
80 likes | 92 Views
This project aims to simulate collisions and interactions between particle-built models with accuracy and efficiency. Techniques include separating particles into cells based on position, randomly selecting a fraction of each cell's residents for interactions, and constraining particle positions to discrete points. Version II introduces voxelation, partitioning space into unit cubes and storing objects as collections of cells. Advantages of voxel space include reduced iteration and protection against instability.

E N D
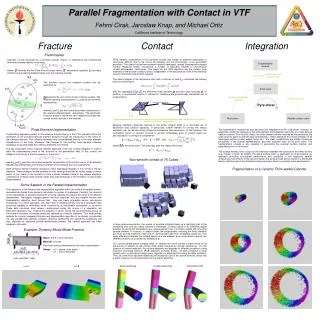
Optimization of Finite-Element Physical Simulations • Goal: simulate collisions/interactions between particle-built models with accuracy and efficiency
Techniques • 1) Separate particles into cells according to position during each iteration; particles interact only with those close to them
Techniques (cont'd) • 2) In each iteration, randomly select a fraction of each cell's residents to find interactions for
Future Research Possibilities • Constrain particles' positions to discrete points, to avoid two particles getting too close
Version II: Voxelation • Space is partitioned into unit cubes • Object is stored as collections of cells (voxels) whose mass changes with time according to forces between them A simple voxel object
Techniques • Store each object's voxels in a variable length array • In one timestep, mass moves from voxel to voxel; velocity of all mass in a given voxelis recalculated according to these fluxes of momentum • empty voxels are discarded after each step, new ones created when mass flows out of existing voxel range
Problems with Voxel Space Step: • exact position of mass is not kept, so mass from one voxel may spread out infinitely over time, depending on velocity • Solution: Store mean position of all mass within a voxel, use this in finding transfer to other voxels 1 2 3 4 .125 .25 .375 .5 .5 .375 1 1 .5 .25 .125 Shows mass in voxels at each timestep for given velocity vector without storing mean position
Advantages of Voxel Space • no need to iterate through all particles to find interactions; each voxel interacts only with those surrounding it • no need to protect against instability leading to infinite forces and speeds