Download
1 / 1
20 likes | 231 Views
Limit cycle walking. Daan G. E. Hobbelen Delft University of Technology 3mE - BioMechanical Engineering Mekelweg 2 , 2628 CD Delft The Netherlands Tel: +31 15 2786844 Fax: +31 15 2784717 Email: d.g.e.hobbelen@tudelft.nl.

E N D
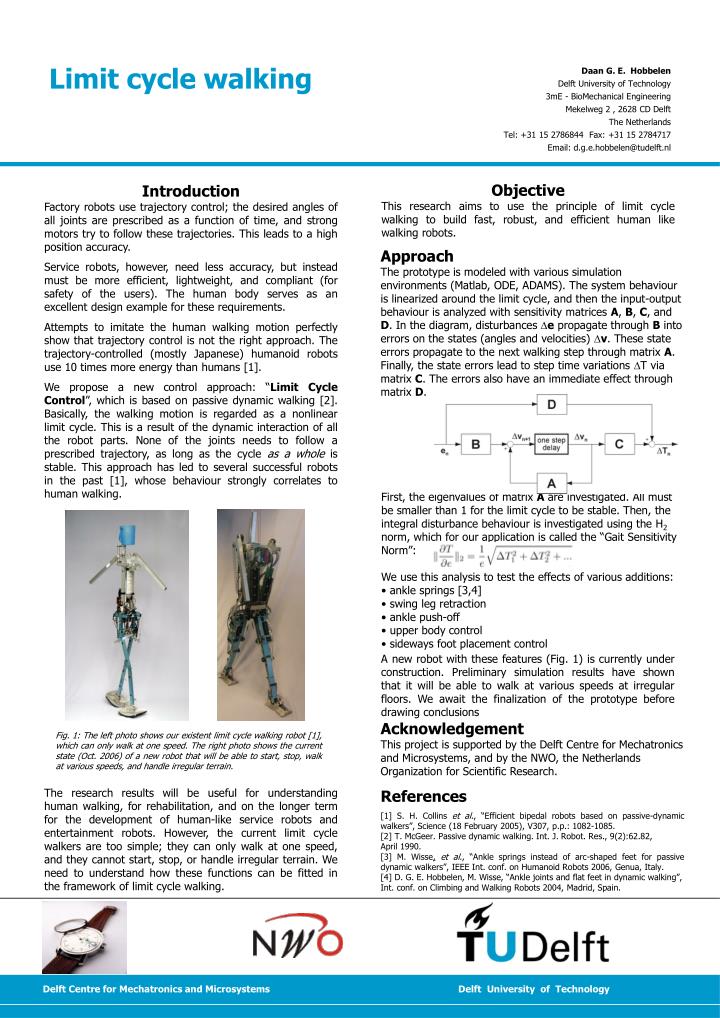
Limit cycle walking Daan G. E. Hobbelen Delft University of Technology 3mE - BioMechanical Engineering Mekelweg 2 , 2628 CD Delft The Netherlands Tel: +31 15 2786844 Fax: +31 15 2784717 Email: d.g.e.hobbelen@tudelft.nl ObjectiveThis research aims to use the principle of limit cycle walking to build fast, robust, and efficient human like walking robots. IntroductionFactory robots use trajectory control; the desired angles of all joints are prescribed as a function of time, and strong motors try to follow these trajectories. This leads to a high position accuracy. Service robots, however, need less accuracy, but instead must be more efficient, lightweight, and compliant (for safety of the users). The human body serves as an excellent design example for these requirements. Attempts to imitate the human walking motion perfectly show that trajectory control is not the right approach. The trajectory-controlled (mostly Japanese) humanoid robots use 10 times more energy than humans [1]. We propose a new control approach: “Limit Cycle Control”, which is based on passive dynamic walking [2]. Basically, the walking motion is regarded as a nonlinear limit cycle. This is a result of the dynamic interaction of all the robot parts. None of the joints needs to follow a prescribed trajectory, as long as the cycle as a whole is stable. This approach has led to several successful robots in the past [1], whose behaviour strongly correlates to human walking. ApproachThe prototype is modeled with various simulation environments (Matlab, ODE, ADAMS). The system behaviour is linearized around the limit cycle, and then the input-output behaviour is analyzed with sensitivity matrices A, B, C, and D. In the diagram, disturbances e propagate through B into errors on the states (angles and velocities) v. These state errors propagate to the next walking step through matrix A. Finally, the state errors lead to step time variations T via matrix C. The errors also have an immediate effect through matrix D. • First, the eigenvalues of matrix A are investigated. All must be smaller than 1 for the limit cycle to be stable. Then, the integral disturbance behaviour is investigated using the H2 norm, which for our application is called the “Gait Sensitivity Norm”: • We use this analysis to test the effects of various additions: • ankle springs [3,4] • swing leg retraction • ankle push-off • upper body control • sideways foot placement control A new robot with these features (Fig. 1) is currently under construction. Preliminary simulation results have shown that it will be able to walk at various speeds at irregular floors. We await the finalization of the prototype before drawing conclusions AcknowledgementThis project is supported by the Delft Centre for Mechatronics and Microsystems, and by the NWO, the Netherlands Organization for Scientific Research. References [1] S. H. Collins et al., “Efficient bipedal robots based on passive-dynamic walkers”, Science (18 February 2005), V307, p.p.: 1082-1085. [2] T. McGeer. Passive dynamic walking. Int. J. Robot. Res., 9(2):62.82, April 1990. [3] M. Wisse,et al., “Ankle springs instead of arc-shaped feet for passive dynamic walkers”, IEEE Int. conf. on Humanoid Robots 2006, Genua, Italy. [4] D. G. E. Hobbelen, M. Wisse, “Ankle joints and flat feet in dynamic walking”, Int. conf. on Climbing and Walking Robots 2004, Madrid, Spain. Fig. 1: The left photo shows our existent limit cycle walking robot [1], which can only walk at one speed. The right photo shows the current state (Oct. 2006) of a new robot that will be able to start, stop, walk at various speeds, and handle irregular terrain. The research results will be useful for understanding human walking, for rehabilitation, and on the longer term for the development of human-like service robots and entertainment robots. However, the current limit cycle walkers are too simple; they can only walk at one speed, and they cannot start, stop, or handle irregular terrain. We need to understand how these functions can be fitted in the framework of limit cycle walking.