Download
1 / 22
220 likes | 342 Views
Force Panel Measurement of Human Dexterity. Data mining for the project EU FP7 VERITAS Dexterity parameters estimation Cognitive test Clinical assesment tool Smart interface Serious games Applications implemented Discrete Tracking task Continuous Tracking task Fitts Law Force Control

E N D
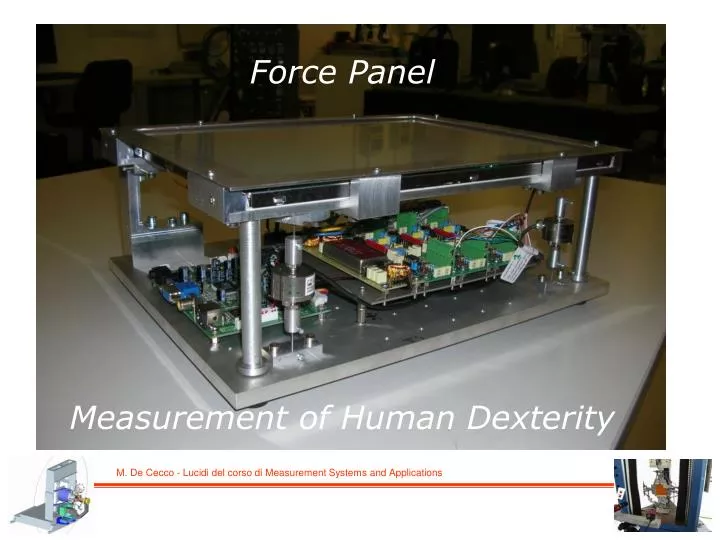
Force Panel Measurement of Human Dexterity
Data mining for the project EU FP7 VERITAS Dexterity parameters estimation Cognitive test Clinical assesment tool Smart interface Serious games Applications implemented Discrete Tracking task Continuous Tracking task Fitts Law Force Control Human Transfer Function
Point to point motion task • Measures the following: • Reaction time • Movement time • Path deviation in point to point motion • Movement speed • Dwelling Percentage Time in Target • Percentage of success 3
[mm] [mm] Subject 1: mild hemiparesis
[mm] not enough force 5 [mm] Subject 3: severe hemiparesis
Continuous tracking tasks • Measures the following: • Percentage time in target • Root Mean Square Error • Mean Deviation to trajectory • Mean speed • Standard deviation speed • Mean error to hold the position • Standard deviation of holding position 7
[mm] 8 [mm] Subject 1: mild hemiparesis
[mm] 9 [mm] Subject 3: severe hemiparesis
Continuous tracking tasks: results quantification START Finger position Target position Continuous tracking tasks
Fitt’s law • Measures the following: • A that is the reaction time. • B that is the inverse of the index of performance IP Subject 3 : severe hemiparesis B IP A 11
In executing the task, subjects are asked to touch as fast as possible two circular markers. The ‘starting’ marker is white and has always the same dimension, the ‘final’ marker is red and has a randomly variable dimension and distance from the previous one. In order to achieve a statistically meaningful number of data at least 28 iterations are achieved The main criteria of trajectory planning is to minimise the variance of the limb’s position. Variance is due to noise in the neural control signal (i.e. in the firing of motor neurons) that causes trajectories to deviate from the desired pathNoise in the neural control signal increases with the mean level of its signal. . These deviations, accumulated over the duration of a movement, lead to variability in the final position. This explanation of signal-dependent noise is consistent with psychophysical observations that the variability of motor errors increases with the magnitude and the velocity of the movement, as captured by the empirical Fitt’s law. Fitt’s Law
In the presence of such signal-dependent noise, moving as rapidly as possible requires large control signals, which would increase the variability in the final position. As the resulting inaccuracy of the movement may lead to task failure or require further corrective movements, moving very fast becomes counterproductive. Accuracy could be improved by having low control signals, but the movement will be slow. Thus, signal dependent noise inherently imposes a trade-off between movement speed and terminal accuracy Fitt’s Law
But there is another variable: Difficulty of the task
The Fitts's law, proposed by Paul Fitts in 1954, is a heuristic model of human movement in human interaction which models the time required to move to a target area as a function of the distance to and the size of the target. Fitts's law is used to model the act of pointing, either by physically touching an object with a hand or finger, or virtually, by pointing to an object on a computer display using a pointing device. The resulting model of the Fitts law is inherently linked to the aim of minimizing the final positional variance for the specified movement duration and/or to minimize the movement duration for a specified final positional variance determined by the task. Fitt’s Law
According to Fitts’ Law, the time to move and point to a target of width W at a distance A is a logarithmic function of the ration A/W, proportional to difficulty: MT = a + b log2(2A/W + c) Where: - MT is the movement time - a and b are empirically determined constants, that are device dependent. - c is constant and equal to 1 - A is the distance (or amplitude) of movement from start to target centre - W is the width of the target, which corresponds to “accuracy” The term log2(2A/W + c) is called the index of difficulty (ID). It describes the difficulty of the motor tasks. 1/b is also called the index of performance (IP), and measures the information capacity of the human motor system a is linked tot he reaction time Fitt’s Law
Time [ms] ID [bit] Fitt’s Law
Position-Force tracking tasks • Measures the following: • Position MSE • Force MSE • FFT 19
M. Kirchner, M. De Cecco, M. Confalonieri, M. Da Lio, ”A joint force-position measurement system for neuromotor performances assessment”, accepted by MeMeA 2011 (IEEE International Symposium on Medical Measurements and Applications, Bari, Italy, 30-31 May 2011)