Download
1 / 13
130 likes | 217 Views
Biosensing and Bioactuation Workshop By Dr. James E. Hubbard, Jr. Samuel P. Langley Professor (University of Maryland) November 27-28, 2007. Biomimetic flight. “the application of methods and systems found in nature to the study and design of engineering

E N D
Biosensing and Bioactuation Workshop By Dr. James E. Hubbard, Jr. Samuel P. Langley Professor (University of Maryland) November 27-28, 2007
Biomimetic flight “the application of methods and systems found in nature to the study and design of engineering systems and modern technology.”
orpheus Planform Shape Wing Morphing Strike Configuration Surface Pressure Sensing Biologically Inspired:
Traditional approaches to shape control use discrete transducers and lumped parameter modeling techniques e.g. finite element For real-time shape control these techniques can only address performance measures in a limited fashion, if at all Distributed Parameter Control – the control of systems described by space and (usually) time, can more effectively address spatial performance requirements
In addition to traditional temporal bandwidth requirements: Shape control requires both a prescribed spatial bandwidth and a set of shapes that characterize the control task, e.g. airfoil, wing and engine inlet shapes for efficient flow control Distributed Parameter System Control techniques and Spatially Distributed Transducers are well suited to the design and implementation of dynamic shape control in modern systems
0 db 0 -100 150 Frequency Wavenumber 0 40 Wavenumber/freq Response Fcn; Distributed Parameter System
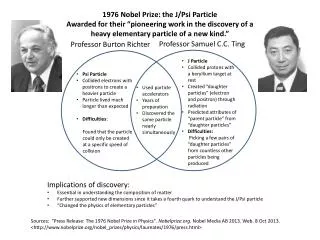
Quantum Tunneling Composite Carbon Nanotube Piezo-resistive Example Co-incident Lift and Drag Sensor Prototype Sensors
What:Design, build, and demonstrate a seamless, aerodynamically efficient, aerial vehicle capable of: radical shape change Why:The ability to change the critical physical characteristics (aerodynamic shape) of the Vehicle in flight would enable/allow a single vehicle to: perform multiple mission profiles How:Distributed Parameter System control techniques and spatially distributed transducers: are well suited to the design and implementation of dynamic shape control in modern systems
Given the success and availability of temporal frequency domain tools in classical and robust, multi-variable lumped parameter systems control theory: The introduction of spatial frequency transforms to distributed parameter systems and control follow naturally! Using MIMO techniques one can construct an input/output relation representing a DPS in a temporaland spatial frequency domain