Download
1 / 48
480 likes | 636 Views
DFHRS (Digital FEM Height Reference Surface) – A Rigorous Approach for the Integrated Adjustment of Fitted Height Reference Surfaces (HRS) -. Reiner Jäger Hochschule Karlsruhe Technik und Wirtschaft - University of Applied Sciences Faculty of Geomatics

E N D
DFHRS (Digital FEM Height Reference Surface) – A Rigorous Approach for the Integrated Adjustment of Fitted Height Reference Surfaces (HRS) - Reiner Jäger Hochschule Karlsruhe Technik und Wirtschaft - University of Applied Sciences Faculty of Geomatics Studiengang Vermessung und Geomatik & International Programme Geomatics (MSc) Institut für Angewandte Forschung (IAF) Moltkestrasse 30, D-76133 Karlsruhe www.dfhbf.de ; www.geozilla.de; www.galileo-bw.de; www.moldpos.eu
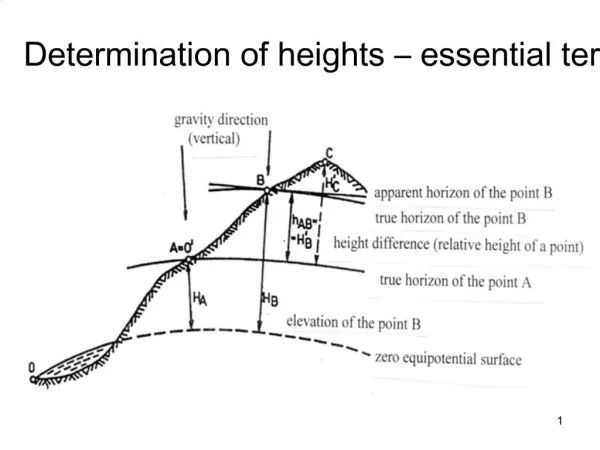
Height Systems - Definitions and Terrestrial Realisiation H=const. Small Area ~ „constant Waterlevel“ H h Geoid = Ideal Height Reference Surface (HRS) N Levelling and Gravity Observations Gepotential Numbers C Terrestrial Height Determination A
New European Normal-Height Network EUREF/UELN ‚95/98 Adjustment by Geopotential Numbers (Differences Datumspoint W0 bzw. C0 Amsterdam „NAP“ DHHN‘92 ( Diff.: 1 cm) Accuracy Situation
GNSS-Heightung „Hfrom h-GNSS“ HRS-Model N H Geoid h „HRS“ Quasigeoid h N H = h - N
HRS = Geoid / Quasigeoid – Physical Definition & Realisation Gravity Potential W of the Earth at Point P(r,λ, ) Centrifgal - Potential due to Earth-Rotation Gravitational Potential of the Earth Masses Spherical Harmonics Coefficients as Parameters Q-Geoid Geoid (W=Wo=const) HBF
Satellite Geodetic Methods of Gravity Field Determination • Satellite Laser Ranging (SLR) „LEOS“ (Low Earth OrbitSatellites) LAGEOS 1, 2 STELLA, etc. Original Observation:Laserranges Derived of it:Orbit Disturbances Derived of it: Spherical Harmonics (Müller/Kaula, 1960,1962)
Satellite Geodetic Methods of Gravity Field Determination • Present Missions • Hybride Sensors • Aktice Measurements CHAMP Observation Quantities 1.) Abs. Positionierung via GPS (Black-Jack Receiver/NASA, JPL): x(t) 2.) Relative Orbitmovements by Inter-Satellite Observations: 3.) Precise Accelerometers aiSTAR (Onera/Frankreich): 4.) Gradiometers (e.g. GOCE) Derived of these:1.) Orbit Determinations 2.) Gravitational Accelerations gi(x,t) and Gradiometer-Tensor Derived from that:Spherical Harmonics Coefficients
Satellite Geodetic Methods of Gravity Field Determination H H J H H J [cm] Earth Geopotential Model 96 (NASA) EIGEN ( = European Improved Gravity Model of the Earth by New Techniques)
N(p) Latitude(degree) Longitude(dgree) Satellite Geodetic Methods of Gravity Field Determination DFHRS_DB Namibia and Tanzania: 1.) Identical Points (N=h-H) & 2.) EGM96 bzw. EIGEN-GL04C H H J H H J [cm] Earth Geopotential Model 96 (NASA) EIGEN ( = European Improved Gravity Model of the Earth by New Techniques)
Bilance for Satellite Geodetic GPM(EGM2008; EIGEN) Not sufficient for GNSS-Heighting H = h – N !!! n,m < 500 => N < 0.3 m ! => Further Informationfor further Improvement of the HRS and N necessary! Hybrid and redundant Models! Terrestrial Gravity Measurements Identical Points (H, h) N=h-H “Geoid Fitting“
Hybride Modeling in HRS-Computation 1.) EGG97 - European Gravimetric QGeoid 1997 (IfE, Hannover) Representation GRID Short-Waved: ~ (1 – 3) cm Medium-/Long Waved 0.1-1.5 m ! Weg 1: Stokes-based (h, H)
Hybride Modeling in HRS-Computation 2.) Prof. Dr.-Ing. H.-G. Wenzel – Fitted Geopotenzialmodell (GPM 98) Dgl.-based + + (h, H) n = m = 1800 Accuracy of N ~ (10 - 30) cm Parametrice Represenation (or Grid)
Hybride Modeling in HRS-Computation 3.) „BKG-Model – Parametrisation of the Potentials by additional Mass Points Massen-Points as essential additional Parameters (h, H) Representation of BKG HRS: Grid
DFHRS-Concept Direct - No Identical Points - - Online - Postpro- cessed DFHRS-DB H = hGPS(B,L) - DFHRS(B,L,h)korr H = hGPS(B,L) - (NFEM(p|B,L,h) +∆m·h)
FEM representation of height reference surfaces 3D difference at any point P(x,y) along the border SA_SE of the meshes m and n has to vanish
FEM representation of height reference surfaces Result: Continuous Height Reference Surface: NFEM(p)
Digital FEM Height Reference Surface (DFHRS)- Concept Complete New Computation of continuous HRS (p and m)! DFHRS – Adjustment Approach State of the Art < 2005 NFEM(p) N(pj) hGNSS+ v = H + NFEM(p)- hGPS· m H + v = H NG‘j + v j = NFEM(p) + NG(d j) <=GPS/Levelling Fitting Points <= Any number Geoidmodels (Global, regional, local) • j + v = - FB / M(B) p + (d,) j j + v = - FL/(N(B)cos(B)) p + (d,) j <= Sets of Deflections from Vertical (Zenith Cameras or Geoidmodels) g·S()dσ + v =NFEM(p) <= „Gravity“ by correlated Geoidmodels In the sense of an 2 step adjustment
Weak-Shapes of Classical Gravimetric „Geoid“models EGG97 European Gravimetric Geoid 1997 Mean- up to lang-waved Errors 0.1 – 1.5 m ! => New Concepts, more „precise“ or better: (H,h)-fitted solutions
Standard GNSS/GPS-heighting Approaches using identical Points Tallinn Example Pure Geoid-Approach EGG97-Geoid without Datum N(d) +/- 3.5 cm „Tilt“
Standard GNSS/GPS-heighting Approaches using identical Points HBF:= NG + NG(d) Tallinn Example Pure Geoidapproach EGG97-Geoid With Datum N(d) +/- 4 mm
DFHRS Software • Identical • „Fitting“ • Points • (B,L,h;H) • Meshes • Patches
Hochschule für Technik und Wirtschaft • - University of Applied Sciences • LVA Baden-Württemberg • LVA Hessen • LVA Rheinland-Pfalz • LVA Riga, Latvia • University of Federal Forces Munich • University Darmstadt DFHRS Software Every geoid- and/or vertical deflection model N can be „patched“ NG(d j)
DFHRS_DB Design Parameters <_3_cm DFHRS_DB Windhuk, Namibia EGM96 • Meshsize (p=3) • 20-30 km : HRS approximation error < (5-10) cm • 10 km: HRS approximation error <1 cm • 5 km: HRS approximation error < 0.5 cm • Fitting Point Density (< 10 mm points, EGG97) • 50 points per (100 km x 100 km): <_1_cm DFHRS_DB • 10 points per (100 km x 100 km): < 3_cm DFHRS_DB • 3-4 points per (100 km x100 km): < 5-10_cm DFHRS_DB
DFHRS_DB Design Parameters Design Studies < 5 - 10_cm DFHRS Germany • Patch-Size (EGG97) • 30 - 40 km for a < 1_cm DFHRS_DB • 50 – 60 km for a < 3_cm DFHRS_DB • 300 km for a < 10_cm DFHRS_DB (3-5) points per patch
< 10cm DFHRS Europe – „Fittingpoint-Design“ ETRS89/EVRS „GPS-/Levelling- Points of EVN“ Fitting Points NFEM(p) =: h - H Used for the 1st Version < 10_cm DFHBFS Europe
Austria Germany Estonia Latvia Lithuania Switzerland Number of unused control points 9 95 21 25 46 13 RMS [cm] 7.5 4.2 8.8 9.2 6.8 7.0 <_10_cm DFHRS_DB - Indepent Quality Control <1_dm EVRF2004 (Present Version, 35 km meshes, 34 Patches)
Overview about European DFHRS_DB 2003 5 km < 1 cm 10 km < 3 cm 2005 30 km Mesh Size New 2006 < 10 cm
DFHRS_DB - Product as CD-Installation of State Land Services in Germany CopyProtection inclusive
European DFHRS_DB… including < 1 cm DFHRS_DB Ungary Test - Area (50 x 90 ) km 1-2_cm DFHRS_DB Budapest 5 km FEM Meshes DFHRS 4.0 Software
DFRHS – Extension to Gravity Observations A,P =>Cp Geodetic Network Optimization - 1st/2nd/3rd Order Design:
DFHRS - Extension to Gravity Observations Sensor-Observation
Extension of the DFHRS-Concept to Gravity Observations „<1cm-Resolution („2mm“) of HRS“ Instead of classical global spherical harmonics (n=m=7200) Spherical Cap Harmonics (SCHA) Cap P
Sperical- Harmonics l = 2, l = 6, l = 4 Global Spherical Cap Harmonics (SCHA) q0=90° q0 =90° q0 arbitrary q0 =arbitrary l(2) = 109.2714 l(4) =200.4828 l(6) = 290.9488
DFHRS - Extension to Gravity Observations SCHA „Handling“ SCHA „Resolution“ („2mm Geoid“, n=7200 u =50.000.000) α= 1° (=110 km area) => k-SCHA = 80 and u = 6.400 α= 3° (=330 km area) => k-SCHA = 250 and u= 62.500 α= 25° (Europe) => k-SCHA = 2000 and u =4.000.000
DFHRS - Extension to Gravity Observations Treatment of Gravity Observations Sensor-Observation at Position P(x,y,z)
Extension of the DFHRS-Concept to gravity observations hGNSS+ v = H + fT p- hGPS· m H + v = H NG‘j + v j = fTp + NG(d j) NFEM(p) N(pk) • j + v = - fBT/ M(B) p + (d,) j j + v = - fLT/(N(B)cos(B)) p + (d,) j g·S()dσ + v =NFEM(p)= fT p
Example Saarland (Jan. 06) DFHRS-Software with Computation Design Version 1 ( 1cm Reference) EGG97 („Gravity indirect“) + Identical Points Version 2 („Gravity indirect“) Gravity Disturbances dg GPM98 Identical Points 1 CAP Result: 1_cm Coincidence of the HRS between Version 1 and Version 2
„1_cm DFHRS of Baden-Württemberg“ (EIGEN-GPM, Gravity Values, Fitting Points)
„1_cm DFHRS of Baden-Württemberg“ (EIGEN-GPM, Gravity Values, Fitting Points)
„1_cm DFHRS of Baden-Württemberg“ (EIGEN-GPM, gravity values)
Solution Concept for • HRS-Computation and • GNSS-Heighting • - Strict mathematical base for continuous FEM_HRS & *DFHRS-Software* • New concept for an overdetermined BVP =>parametric HRS determination • Mesh and patch-design => Any accuracy and any! area size (<= FEM) • Open for all geometrical & physical (e.g. gravity) observations! • DFHRS = (Leading) Geoidfitting Concept • Ready for 1 cm EVRS using existing data +EPN densification fitting-points! • High practical relevance for GNSS services all over the world • Industrial Standard in GNSS-Equipment and GIS • DFHRS_DB => RTCM 3.q Message used in GNSS-Services, NTRIP etc. • - High Capacities for International Cooperations and for EVRS