Download
1 / 9
90 likes | 271 Views
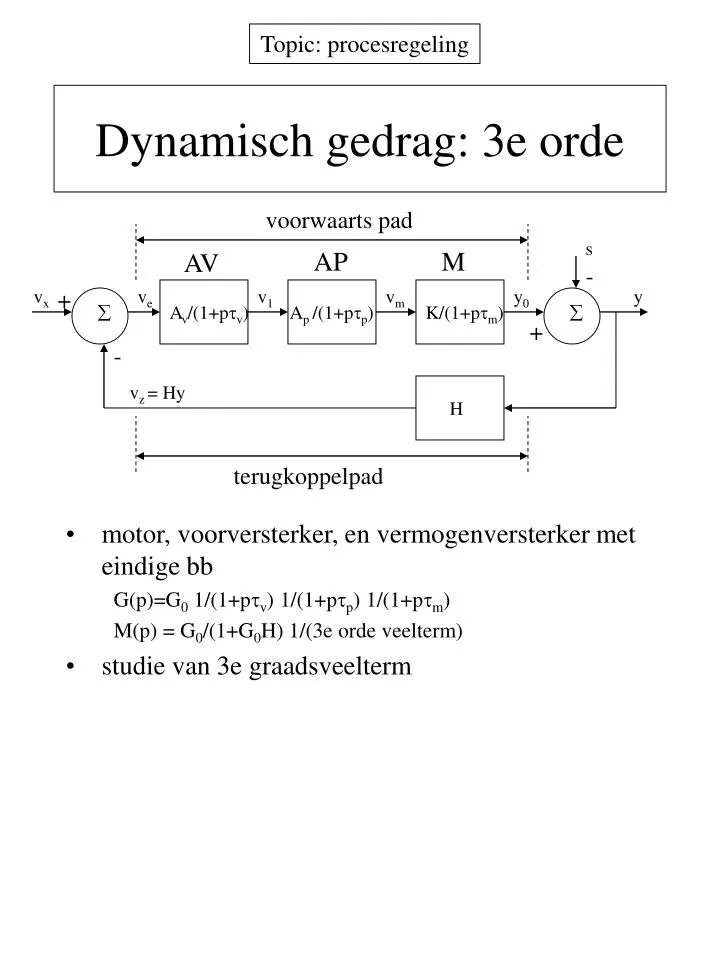
Dynamisch gedrag: 3e orde. voorwaarts pad. s. AP. M. AV. -. motor, voorversterker, en vermogenversterker met eindige bb G(p)=G 0 1/(1+p v ) 1/(1+p p ) 1/(1+p m ) M(p) = G 0 /(1+G 0 H) 1/(3e orde veelterm) studie van 3e graadsveelterm. v x. +. v e. v 1. v m. y 0. y. .

E N D
Dynamisch gedrag: 3e orde voorwaarts pad s AP M AV - • motor, voorversterker, en vermogenversterker met eindige bb G(p)=G0 1/(1+pv) 1/(1+pp) 1/(1+pm) M(p) = G0/(1+G0H) 1/(3e orde veelterm) • studie van 3e graadsveelterm vx + ve v1 vm y0 y Av/(1+pv) Ap /(1+pp) K/(1+pm) + - vz = Hy H terugkoppelpad
Dynamisch gedrag: 3e orde m |G|, |M| [dB] v |GH|>1 G0 • frequentie fr met positieve terugkoppeling • fasehoek exact -180 en |GH| > 1 • onstabiel systeem • fysische verklaring • resultaat = verzadiging met continue slingering open lus |GH|=1 p G0 /(1+G0H) gesloten lus GBW 0 log(freq) 1/(2m) 0° Fase van GH log(freq) -180° negatieve fasespeling
vb. T-regeling chemische reactor • doel: • temperatuur T2 constant houden • gegevens: • gevoeligheid mengkraan: K0 = 20°C/Volt • gevoeligheid thermistor: H = 5 mV/°C • tijdsconstante reactor r = 10 s • tijdsconstante kraan k = 1 s • tijdsconstante versterker v = 0.1 s • statische nauwkeurigheid moet 1 % vx ve + - V vz K 100°C T2 T1 0°C
vb. T-regeling chemische reactor voorwaarts pad • werking • statische nauwkeurigheid 1 % G0H = 100 Av0 = 1000 • Bode diagramma • twee polen door systeem zelf • r = ((G0H)/(kr)) = 3.16 rad/s • = -bgtg(rr)-bgtg(rk)-bgtg(rv)+180° = 1.86° • op randje van stabiliteit • fysische uitleg • figuur • versterker goed kiezen reactiewarmte kraan reactor V - vx + ve Av0/ (1+0.1p) v1 T1 T20 T2 20/(1+p) °C/V 1/(1+10p) + - vz = HT2 H 5mV/°C terugkoppelpad
Compensatie van instabiele systemen • streven naar een fasespeling van 45° • versterker: • ingebouwde fasevoorijling • voldoende bb • compenserend nulpunt en bijkomende pool voorbij het |GH|=1 snijpunt = -bgtg(0r)+bgtg(0/P1)+bgtg(0/Bv)+180° > 45°
Elektronische regelversterker • transferfunctie: T(p) = -R2/R1 (1+p(R1+R0)C)/(1+pR0C) met bb beperking van opamp • hoe volgende transferfunctie te realiseren ? T(p) = 1000 (1+p)/(1+p/12) 1/(1+p/100) R1 R2 C R0 - + Ad + + Vi Vo - -
PID regelaars • proportionele regelaar • stuurspanning foutspanning • steeds statische fout • PD regelaar (proportioneel-differentiërend) • invoeren nulpunt = differentiatie Av0 Ve + Kn p Ve = Av0 (1+pn) Ve • PID regelaar (proportioneel-integrerend-differentiërend) • integratie maakt statische fout nul • met zuivere integrator G(p) = KvKso/p M(p) = KvKso/(p+KvKsoH) y() = 1/H Kv = 0/(HKso) log|G| Kv/p vx + y KvKso /p Kso - 1/H vz = Hy H 0 log
BANG-BANG regelaar • aan-uit • te regelen grootheid tussen twee grenzen • verwarmingssystemen • vloeistofniveaus • eenvoudig en goedkoop (enkel schakelelement) • geen invloed op responsiesnelheid • gebaseerd op Schmitt-trigger
Opmerkingen • stochastische verstoringen en parametervariaties • multi-dimensionele systemen • DSP is goedkoop: digitale compensatie • flexibel