Download
1 / 61
680 likes | 1.29k Views
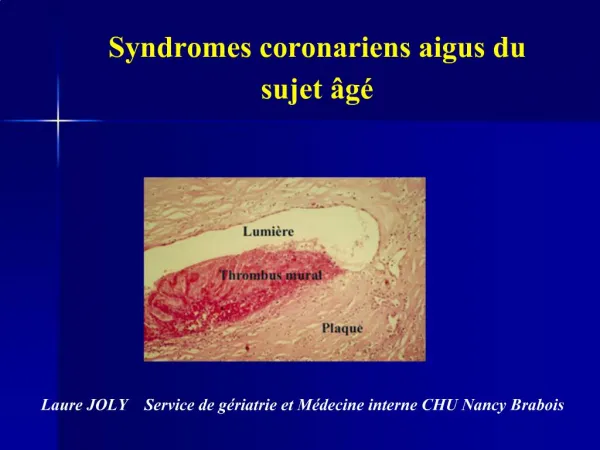
PID regul átory: problémy teorie a praxe. Miloš Schlegel, ZČU v Plzni. březen, 2003. schlegel@kky.zcu.cz www.rexcontrols.cz. Obsah. Základní pojmy PID regulace Empirické metody automatického nastavování PI(D) regulátorů Exaktní PID autotuner. 1. Základní pojmy.

E N D
PID regulátory: problémy teorie a praxe Miloš Schlegel, ZČU v Plzni březen, 2003 schlegel@kky.zcu.cz www.rexcontrols.cz
Obsah • Základní pojmy PID regulace • Empirické metody automatického nastavování PI(D) regulátorů • Exaktní PID autotuner
1. Základní pojmy • Struktura jednoduchého regulačního obvodu • Klasifikace regulovaných soustav • Vlastnosti regulátoru P, PI, PID • Dvoupolohová, kroková, a spojitá regulace
Regulace tlaku v ústí cihlářského lisu Příklad jednoduchého regulačního obvodu ... vlhkost cihlářské suroviny voda d w požadovaný tlak u regulátor y skutečný tlak M
Struktura jednoduchého regulačního obvodu Jednoduchá regulační smyčka ... neměřitelná porucha měřitelná porucha d1 d2 dopředná vazba požadovaná hodnota akční veličina regulovaná veličina regulátor w proces u y šum čidlo
Jednoduchá regulační smyčka Inženýrské požadavky na regulační smyčku ... regulátor proces Odregulování poruch Sledování požadované veličiny Robustnost množina přípustných ŘS nominální ŘS
Klasifikace řízených soustav Statické, astatické, neminimálně fázové a kmitavé systémy ...
Dobře a špatně regulovatelné soustavy Velmi hrubé rozdělení řízených soustav ... y(t) T D t Normalizované zesílení Normalizované zpoždění dobře regulovatelné soustavy špatně regulovatelné soustavy
y u Soustavy vyššího řádu jsou špatně regulovatelné u y n 2 3 4 5 6 7 8 0,11 0,22 0,32 0,41 0,49 0,57 0,64 0 0,12 0,25 0,35 0,42 0,48 0,57 224 103 70 55 47 41 37
Dvoustavový nespojitý regulátor Nejjednodušší, nejrobustnější ... ! proces Relé s předstihem Relé s hysterezí Relé s necitlivostí Ideální relé
P - regulátor Nejjednodušší spojitý regulátor ... ! K proces Regulační odchylka v ustáleném stavu je nenulová:
PI - regulátor Nejpoužívanější regulátor v průmyslové praxi ... ! PI proces PI-regulátor zajišťuje nulovou regulační odchylku v ustáleném stavu při konstantních hodnotách w, d, n. bez poruch
PI – regulátor: odezva na poruchu Kmitavost smyčky se zvětší zvýšením zesílení a snížením integrační časové konstanty ... Regulátor: Proces:
PI – regulátor: odezva na pož. hodnotu Optimální nastavení parametrů pro odezvu na skok v požadované hodnotě je jiné než pro odezvu na skok v poruše ... Regulátor: Proces:
PID - regulátor ! Standardní regulační algoritmus ... PID proces Derivační složka snižuje normalizované zpoždění. PI proces D
PID – regulátor: odezva na poruchu V běžném případě přidáním derivační složky (Td=Ti/4)do PI regulátoru zvýšíme bezpečnost ve stabilitě ... Regulátor: PI PID Proces:
b) c) d) Proces: Srovnání kvality řízení průmyslových regulátorů Relé: a) Vélké kolísání regulační odchylky ... P: K=0,8 Nenulová regulační odchylka ... PI: K=0,9; Ti=9,0 Velmi robustní, ale málo agresivní regulátor ... PID: K=2,0; Ti=9,7; Td=3,2 Další zvýšení kvality regulace složitějším regulátorem je možné pouze pro špatně regulovatelné procesy ...
Volba typu regulátoru Typ regulátoru je rozumné volit podle velikosti normalizovaného zpoždění ... y(t) T D t zvážit užití kaskádní regulace relé P(D) PI+S PID PI
Realizace PID regulátorů interaktivní neinteraktivní P D I e u e u P I D
Algoritmus se dvěma stupni volnosti Umožňuje nezávisle optimalizovat odezvu regulované veličiny na skok v poruše a v požadované hodnotě. w d d Gw y y u w e u Gy proces G proces Dva stupně volnosti Jeden stupeň volnosti Váhové koeficienty b a c tvarují přechodovou char. uzavřené smyčky, ale nemění odezvu na poruchu. c = 0
Filtrace derivační složky Ideální derivace příliš zesiluje vysokofrekvenční šumy... PID proces D KN Parametr N umožňuje plynule přecházet mezi PI a PID regulátorem. Typicky volíme
Unášení integrační složky(Integrator Windup) Špatně ... I proces Dobře ... I proces
Regulátor s vysledováním Automatické přepínání režimů REGULACE a SLEDOVÁNÍ ... w u K y PI K/Ti 1/s w y SP PV MV TR u v 1/Tt v modul PI regulátoru PI1 w1e sel SP PV MV TR PI we SP PV MV TR uwe ye y1e F(s) proces PI2 y2e w2 SP PV MV TR jednoduchá reg. smyčka selektorová regulace
proces Spojitý PID regulátor Amplitudově nebo šířkově modulovaná akční veličina ... PID Spojitá akční veličina QP mv PID proces Dvě šířkově modulované akční veličiny (two/three-step controller) 80 mv 60 30 t QP t
Krokový PID regulátor ( Step controller) Krokový regulátor ovládá servoventil pomocí log. signálů VÍCE a MÉNĚ... generování pulsů servo- ventil třístavový prvek y=pv w=sp UP PID proces DN polohová zpětná vazba Užívají se dvě varianty: s polohovou zpětnou vazbou a bez ní sp pv UP DN
2. Automatické nastavování parametrů PID regulátoru:empirické metody • Zieglerovy-Nicholsovy metody • Astromovy-Hagglundovy metody • Vlastnosti ZN a AH metod
Motivace • Nejčastěji užívané regulátory v průmyslu jsou PI(D) regulátory. Většina z nich je špatně seřízena. Ekonomické důsledky jsou obrovské. • Moderní regulátory jsou vybavené vestavěným autotunerem, který má zajistit zcela automatické nastavení parametrů regulátoru na povel operátora. • Převážná většina průmyslových autotunerů užívá empirické metody Zieglera a Nichose (1942) anebo jejich modifikace. • Chybí teoreticky podložená robustní metoda, která je spolehlivá ve většině praktických případů.
Nejznámější autotunery • Foxboro EXACT (760/761) • Alfa Laval Automation ECA400 • Honeywell UDC 6000 controller • Yokogava SLPPC-181/281 • Siemens PID self-tuner • Fisher-Rosemount Intelligent Tuner • ABB Master system
charakteristická čísla procesu parametry PI(D) regulátoru proces empirické vztahy identifikační experiment Obecné schéma empirického autotuneru
K Ti Td Tp P 1/a 4D PI 0,9/a 3D 5.7D PID 1,2/a 2D D/2 3.4D Zieglerova-Nicholsova (ZN) metoda z přechodové charakteristiky (1942) Nejpopulárnější avšak ne příliš spolehlivá metoda ... Tp je odhad periody kmitů uzavřené smyčky Uvažovaný přenos regulátoru
Modifikace – Astrom, Hagglund (1995) Empirická avšak důkladně otestovaná metoda na skupině typických řízených systémů ... Uvažováný přenos regulátoru (ISA tvar – dva stupně volnosti) Formulace úlohy: Im za vedlejší podmínky Re -1
Modifikace – Astrom, Hagglund (1995) Je použit jiný způsob určení charakteristického čísla T ...
Modifikace – Astrom, Hagglund (1995) PI 0,29 -2,7 3,7 0,78-4,1 5,7 8,9 -6,6 3,0 8,9 -6,6 3,0 0,79 -1,4 2,40,79 -1,4 2,4 0,81 0,73 1,9 0,44 0,78 -0,45 PID 3,8 -8,4 7,3 8,4 -9,6 9,8 5,2 -2,5 -1,4 3,2 -1,5 0,93 0,46 2,8 -2,1 0,28 3,8 -1,6 0,89 -0,37 -4,1 0,86 -1,9 -0,44 0,077 5,0 -4,8 0,076 3,4 -1,1 0,40 0,18 2,8 0,22 0,65 0,051
Test ZN a AH metody z přechodovécharakteristikynasystémech druhého řádu PI regulátor: Odezva na skok v poruše ... Astrom-Hagglund Ziegler-Nichols
Test ZN a AH metody z přechodovécharakteristikynasystémech druhého řádu PID regulátor: Odezva na skok v poruše ... Astrom-Hagglund Ziegler-Nichols
Ziegler-Nicholsova frekvenční (ZNF) metoda (1942) K proces y t K Ti Td Tp Přenos regulátoru: P 0,5Kc 4D PI 0,4Kc 0.8Tc 1,4Tc PID 0,6Tc 0.5Tc 0,125Tc 0,85Tc
Interpretace ZNF metody ZNF metoda vhodně kompenzuje kritický bod frekvenční charakteristiky avšak nezaručuje patřičnou kompenzaci celé frekvenční charakteristiky... PI P PID Im Im [-0,45;0,086] Im [-0,5;0] [1;0] [1;0] [1;0] Re Re Re [-0,6;-0,28]
Identifikace kritických hodnot pro ZNF metodu reléovým regulátorem Metoda užívaná v současných autotunerech k určení kritických hodnot Kc a Tc ... proces
Modifikace ZNF metody – Astrom, Hagglund (1995) Uvažováný přenos regulátoru (ISA tvar – dva stupně volnosti) Vstupní data: Původní ZNF metoda Astrom-Hagglundova modifikace Normalizované zesílení
Modifikace ZNF metody – Astrom, Hagglund PI 0,053 2,9 -2,6 0,131.9 -1,3 0,90 -4,4 2,7 0,90 -4,4 2,7 1,1 -0,0061 1,8 0,48 0,40 -0,17 PID 0,33 -0,31-1,0 0,72-1,6 1,2 0,76 -1,6 -0,36 0,59 -1,3 0,38 0,17 -0,46 -2,1 0,15 -1,4 0,56 0,58-1,3 3,5 0,25 -1,56 -0,12
Test ZNF metody na systémech Odezva na skok v poruše ... PID PI
Test AHF metody na systémech Odezva na skok v poruše ... PID PI
Exaktní revize ZNF metody Výpočet parametrů PI regulátoru z jednoho bodu frekvenční charakteristiky … PI 1,13e-6 6.25e0 2,27e1 -5,04e1 -1,49e1 4,35e1 4,38e0 -1,60e1 -4,88e-1 2,19e0 dosazujeme ve stupních
Exaktní revize ZNF metody Výpočet parametrů PID regulátoru z jednoho bodu frekvenční charakteristiky … PID 3,75e-10 3.19e+1 6,22e-1 -2,01e-1 -6,83e-3 3,08e-3 3,38e-5 -1,83e-5 -6,39e-8 3,97e-8 dosazujeme ve stupních
Exaktní revize ZNF metody Vhodný bod pro výpočet PI a PID regulátoru … PID PI
1 t + 2 ( s 1 ) Princip reléového autotuneru Algoritmus automatického nastavení regulátoru vychází ze znalosti jednoho nebo dvou bodů frekvenční charakteristiky … n T u w y proces A PID
NONSPEC: K=0.37, Ti=26.7, Td=6.7, b=0.65 STATIC_N: K=0.28, Ti=17.34, Td=4.3, b=0.0 NONSPEC: K=1.6, Ti=9.2, Td=2.3, b=0.65 STATIC_N: K=2.0, Ti=12.2, Td=3.1, b=0.28
Jaký model potřebujeme znát pro návrh PID regulátoru ? inflexní bod ZN (1942) MZN (2000) AH (1995) Pulsní metoda (2001) ZN (1942) AH (1995)
3. Exaktní PID autotuner • Momenty - charakteristická čísla procesu • Princip exaktního PID autotuneru • Parametrizace extremálních přenosů • Programová realizace
Charakteristická čísla procesu Přenos procesu Impulsní charakteristika procesu