Download
1 / 7
100 likes | 877 Views
POWER. Elektrotechnik Mechatronik. Elektrische Antriebe Demo. 5.2 DASM mit Schleifring läufer 5.3 DASM mit umschalt- barer Drehzahl Aufg. zum Asynchron- motor 5.4 Drehstrom-Synchron- motor 5.4.1 Drehstrom- Synchronmotor als Servomotor Aufg. zum Synch.-Mot.

E N D
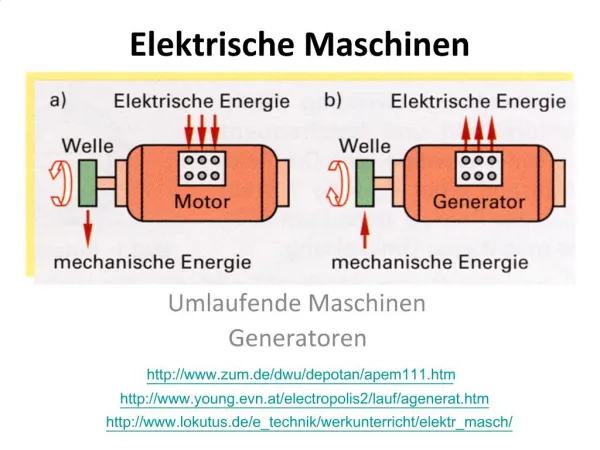
POWER Elektrotechnik Mechatronik Elektrische Antriebe Demo
5.2 DASM mit Schleifring • läufer • 5.3 DASM mit umschalt- • barer Drehzahl • Aufg. zum Asynchron- • motor • 5.4 Drehstrom-Synchron- • motor • 5.4.1 Drehstrom- Synchronmotor • als Servomotor • Aufg. zum Synch.-Mot. • 5.5 Reluktanzmotor • Schrittmotor • Aufg.z.Relukt.-u.Schrittm. • Linearmotor • Aufg. zum Linearmotor • Fachlexikon • Quellenangaben Impressum Inhalt: Einführung • Vorbemerkung • Allgem. Informationen Aufgaben, allgemein • Gleichstrommotor 3.1 Arten von Gleichstrommotoren 3.2 EC-Motor Aufgaben zu GS- Motor Aufg. zu GS/EC- Motor • Wechselstrommotoren 4.1 Universalmotor Aufg. z. Universalmot. 4.2 Kondensatormotor Aufg. z. Kondesat.mot. 5. Drehstrommotoren 5.1 Drehstrom- Asynchronmotor mit Kurzschlussläufer 5.1.1 Eigenschaften des DASM mit Kurzschlussläufer
Das Prinzip des Gleichstrommotors ist relativ einfach, die mechanische Konstruktion dafür recht aufwändig. Die Spule des Ankers (oft als Rotor oder Läufer bezeichnet) wird vom Magnetfeld des Ständers (Stator), dem Erregerfeld, durchdrungen. Der Ankerstrom hat ein Anker-Magnetfeld zur Folge, das sich nach dem Ständerfeld ausrichtet. Dabei dreht sich der Anker. Stehen sich die ungleichnamigen Pole von Erreger- und Ankerfeld gegenüber, dann wird umgepolt, damit die Drehbewegung aufrechterhalten bleibt. Die Umpolung (Kommutierung) erfolgt auf mechanische Art. Dazu sind auf der Achse Schaltelemente (Kommutator mit Stromzuführungsbürsten) angebracht, welche bei der Drehung die Windungen umpolen, die gerade senkrecht zum Erregerfeld stehen. 3. Gleichstrommotor Der Gleichstrommotor ist der klassische regelbare Antrieb. Er wird als Hauptantrieb bis zu einigen 100 kW Leistung, als Universalantrieb und als Servoantrieb bis hinunter in den Wattbereich eingesetzt. Animation des Gleichstrommotors
Dieser Motor ist wie ein Gleichstrom-Reihenschlussmotor aufgebaut und lässt sich im Prinzip auchan Gleichstrom betreiben. Beim Anschluss an Wechselstrom kehren sowohl Erregerfeld als auchAnkerfeld gleichzeitig bei jeder Halbwelle die Richtung um. Dadurch bleibt die Drehrichtung erhalten.Die Erregerwicklung ist zweigeteilt und dient damit neben der Erzeugung des Erregerfeldes auchnoch zur Verringerung der elektromagnetischen Störungen, die aufgrund des Bürstenfeuers am Kommutator entstehen. Entstörkondensatoren sind zusätzlich erforderlich. 4.1 Universalmotor 1 vorderes Motorlager; 2 Lüfterrad; 3 Rotor (Eisenkern mit Kupferwicklung); 4 Kohlebürsten; 5 Kommutator; 6 hinteres Motorlager; 7 Gehäuse mit Statorwicklungen Aufgaben Vorsicht! Elektro-Handgeräte wegen des hohen Anlaufmoments nicht unter Last einschalten! Gefahr von Schäden und Verletzungen! Der Universalmotor verliert bei Belastung an Drehzahl, ist aber beim Einschalten sehr durchzugsstark. Der Universalmotor ist der am meisten verwendete Kleinmotor. Er wird in vielen Elektro-Handgeräten, z.B. Handbohrmaschinen oder Handkreissägen, eingesetzt.
5.4 Drehstrom-Synchronmotor Die Ständerwicklung ist, wie beim Asynchrommotor, eine Drehstromwicklung. Bei Drehmomenten bis ca. 30 Nm verwendet man Läufer mit Permanentmagneten, oft aus Seltenerden. Für höhere Drehmomente muss der Läufer zur Erzeugung des Läuferfeldes mit einer Gleichstromwicklung aufgebaut werden. Die Stromzuführung erfolgt über Schleifringe mit Kupfer- oder Kohlebürsten. Die Drehzahl des Synchron-motors ist abhängig von seiner Polpaarzahl und genau synchron zur Netzfrequenz. Weitere Info zum Drehstrom-Synchronmotor Animation des Synchronmotors Beim Betrieb direkt am Drehstromnetz benötigt der Synchronmotor zum Hochlaufen in die Nähe der Sychrondrehzahl eine zusätzliche Kurzschlusswicklung. Oft wird der Motor aber mit einem Frequenzumrichter oder Servoregler betrieben. Die Ausgangsfrequenz des Umrichters wird dabei so langsam erhöht oder vermindert, dass der Motor mit synchroner Drehzahl folgen kann. Bei Überlastung kommt er außer Tritt und bleibt stehen. Wo hohe Drehzahlkonstanz auch bei größeren Leistungen verlangt wird, ist der Synchronmotor eine gute Wahl. Sein Haupteinsatzgebiet (zahlenmäßig) hat er aber als Servoantrieb. Torquemotor
Im Ständer des Schrittmotors sind Spulen angeordnet, die über eine Steuerelektronik nacheinander geschaltet werden. Der Läufer, ein Permanentmagnet, meist aus Seltenerden, folgt dem Ständerfeld und wird in der jeweiligen Position festgehalten (Rastmoment). Die Zahl der Ständerspulen und die Zahl der Magnetpole des Läufers geben den Schrittwinkel vor. Aber auch die Ansteuerart hat Einfluss auf den Schrittwinkel. In der Prinzipdarstellung beträgt dieser 90 Grad. 6. Schrittmotor Beim Permanentmagnet-Schrittmotor ist die mögliche Anzahl der Pole im Läufer wegen Magnetisierungsproblemen klein. Beim Hybrid-schrittmotor besteht die Rotormitte aus einem zwei-poligen axial magnetisierten Permanentmagneten. Dieser trägt an beiden Enden gezahnte Kappen aus Weicheisen. Die Zähne der einen Kappe bilden Nordpole, die der anderen Südpole. Sie sind um eine halbe Zahnung gegeneinander versetzt. Dadurch wird die effektive Polzahl wesentlich erhöht. Nahezu alle heute erhältlichen Schrittmotoren sind Hybridmotoren. Beide Arten von Schrittmotoren besitzen ein „Rastmoment“, das sie in ihrer Lage hält. Animation Hybridschritt-motor Aufgaben Da Schrittmotoren exakt dem weitergeschalteten Feld folgen, können sie als Servomotoren ohne Sensoren zur Positionsrückmeldung betrieben werden. Die jeweilige Rotorlage kann die Steuerelektronik berechnen. Allerdings wird ein Außer-Tritt-Fallen des Motors dann nicht erkannt. Weitere Info zum Schrittmotor
Autor: Klaus-Peter WagnerHoföschle 1187439 Kempten im AllgäuKontakt:kontakt@power-p.de POWER Elektrotechnik Mechatronik