Download
1 / 10
100 likes | 114 Views
The Group of Destiny User Interface Debugger is designed to display sensor telemetry data, command logs, and camera footage for advanced robot debugging. It features emergency stop and single-step functions for efficient debugging tasks.

E N D
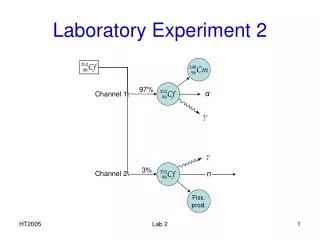
Laboratory 2 Group 19 The Group of Destiny
User Interface - Debugging • Objectives: • Display: • Sensor data (telemetry) – including IR sensors, status of gripper arm, etc • Internal variables of on-board system • Camera images/footage • Command log displaying the commands sent to the robot • Functionality: • Emergency stop button – cancels all pending commands • Single-step-through button – steps through commands on internal stack one at a time
SRS Document • Based off of Heninger document (A7 Specification) • Outline: • Hardware interfaces – the ThinkPad will connect to the robot API and to the control center via Telnet. • Software functions – description of sample commands, desired functionality of system • Timing constraints – hard to say at this point – in a sequence of actions, each action must execute at its proper time?
SRS Document (cont’d) • Response to undesired events • loss of communication should be handled, should stop and wait for message from control station • Incorrect commands should be noticed and rejected, and the commanding system should be notified of the error • Subsets – gripper, cameras, IR sensor system, movement, control center communication – linked via the laptop’s code • Fundamental assumptions – the API works as described in the documentation, that incoming commands will fit our decoding assumptions • Add-ons (e.g., video link to control station, real time control)
Use Cases • Actors • Human • Control Station • Robot • Actor Goals • Human – explore hazardous areas • Control Station • Real-time motion control of the robot. • Display video from the robots cameras. • Display/monitor robot status telemetry. • Deal with system failure situations
Use Cases (cont’d) • Actor Goals (cont’d) • Robot • Real-time motion based on immediate commands from the control station. • Operate peripherals (IR proximity sensors, gripper, etc.). • Capture and transmit video and images. • Protect itself from damage. • Deal with problems such as loss of communications. • Monitor system status (battery voltages, software status, etc.) • Extensive facilities for remote debugging of the on-board software. • A user interface that provides control-station access to the on-board debugging system. • An on-board autopilot capability, i.e., plan motion paths and follow them. • An image library, i.e., a capability to display, archive, and search received images. • Create, check, store, retrieve and uplink motion, peripheral, and camera command sequences. • A VCR mechanism for camera video. • Create map containing previous movements
Use Cases (cont’d) • Sample Use Case
Communications Protocol • Description • Connectivity via telnet • Messages • “Stay alive” command • Telemetry stream • Message format • Debuggery • Group synergy • Milestones
Management Report • Meeting Reports • Group Contributions • Results of Lab Time • Pledge/Approval Sheet