Download
1 / 24
300 likes | 604 Views
PID Denetleyiciler. Yrd.Doç.Dr. Mustafa Doğan. Karmaşık Eşlenik Kutup Bulunan Sistemin PID ile Denetlenmesi. Aktarım İşlevi:. MATLAB Komutları: G=tf (5, [1 -4 5] ) s=tf('s') Kp=1 Td=1 for Ti=[0.7:0.2:1.1] Gc=Kp*(1+Ti/s+Td*s) G_c=feedback(Gc*G,1) step(G_c) hold on end.

E N D
PID Denetleyiciler Yrd.Doç.Dr. Mustafa Doğan
Karmaşık Eşlenik Kutup Bulunan Sistemin PID ile Denetlenmesi • Aktarım İşlevi: MATLAB Komutları: G=tf(5,[1 -4 5]) s=tf('s') Kp=1 Td=1 for Ti=[0.7:0.2:1.1] Gc=Kp*(1+Ti/s+Td*s) G_c=feedback(Gc*G,1) step(G_c) hold on end
Ziegler-Nichols Ayarlama Yöntemi • Matematiksel modeli olmayan ya da kolay çıkarılamayan sistemlerde PID denetleyicilerinin parametrelerini (KP, Ti, TD) belirlemekte kullanılır. • Bir deneyselyaklaşım yöntemidir.
Ziegler-Nichols Ayarlama Yöntemleri • Açık-Döngü Yöntemi • Kapalı-Döngü Yöntemi
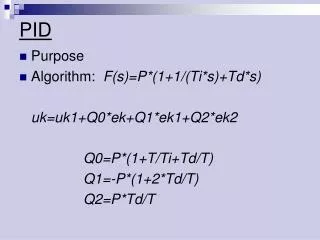
Ayarlanan Parametrelere Göre PID Denetleyicinin Aktarım İşlevi
SİSTEMİN AÇIK DÖNGÜ CEVABI L=0.76 T=1.96 Bükülme Noktası
Sisteme P, PI ve PID ile Denetleyicileri UygulandıktanSonra Kapalı-Döngü Basamak Cevabı
Kapalı-Döngü Yöntemi Tc Kc=Çıkış salınıma başlamadan önceki en yüksek oransal kazanç Tc= Çıkışın Salınım Periyodu
Kapalı-Döngü Yöntemine Göre PID Denetleyicinin Aktarım İşlevi
Kapalı-Döngü Yöntemiyle Hız Sabitleme Sistemi İçin Denetleyici Tasarlanması • Hız sabitleme sisteminin açık döngü basamak cevabı S-Şekilli bir eğriye sahip değildir. • Sisteme sadece oransal denetim eklenip, sistemin kritik K değeri bulunur.
Kapalı-Döngü Yönteminin Hız Sabitleme Sistemine Uygulanması
Kritik K değeri bulunduktan sonra çıkış sinyalinin salınım periyodu bulunur.
Ziegler-Nichols’ün Kapalı-Döngü Yöntemine Göre P, PI ve PID Denetleyicilerin Aktarım İşlevleri