Download
1 / 9
90 likes | 275 Views
Sistema Malha Fechada. Drive. Motor. Realimentação de Velocidade, etc. Utilizando PID . 1. O que é PID? PID – Proporcional Integral Derivativo, os quais são termos utilizados para configura sistemas em malha fechada. O regulador PID é também outro nome para controle em malha fechada.

E N D
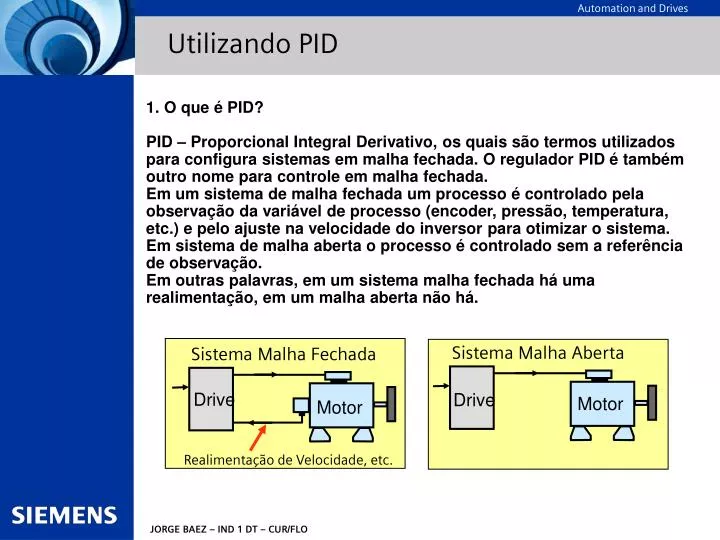
Sistema Malha Fechada Drive Motor Realimentação de Velocidade, etc. Utilizando PID 1. O que é PID? PID – Proporcional Integral Derivativo, os quais são termos utilizados para configura sistemas em malha fechada. O regulador PID é também outro nome para controle em malha fechada. Em um sistema de malha fechada um processo é controlado pela observação da variável de processo (encoder, pressão, temperatura, etc.) e pelo ajuste na velocidade do inversor para otimizar o sistema. Em sistema de malha aberta o processo é controlado sem a referência de observação. Em outras palavras, em um sistema malha fechada há uma realimentação, em um malha aberta não há. Sistema Malha Aberta Drive Motor JORGE BAEZ – IND 1 DT – CUR/FLO
Sistema Malha Fechada Drive Motor Valor atual de velocidade Utilizando PID Sistema Malha Aberta Drive Motor No exemplo acima, o regulador recebe a realimentação de velocidade (valor instantâneo) de um encoder, este é comparado com a velocidade desejada (Setpoint), escolhida pelo operador e a frequência de saída é automaticamente ajustada pelo PID corrigindo qualquer erro. No sistema malha aberta, o drive ajusta a frequência de saída, e o motor gira próximo a velocidade desejada, mas sujeito a variações de carga e temperatura, etc. A diferença entre o setpoint e o valor instantaneo, medido pelo encoder, é chamado de erro. O setpoint e o valor instantâneo são frequentemente temperatura, pressão, pacote por hora, etc. JORGE BAEZ – IND 1 DT – CUR/FLO
Princípios Gerais – Malha fechada Processamento do Erro Proporcional Erro Setpoint- Valor desejado Processo; e.g. ventilador com controle de pressão Escala, controle; e.x. Drive Integral Derivativo Ponto de soma Sensor Valor instantâneo - p.e. pressão JORGE BAEZ – IND 1 DT – CUR/FLO
Implementação no MICROMASTER MM4 Pontos chave: • MM420 e MM440 possuem embarcados sistemas de controle de malha fechada . • Vários tipos de setpoints estão disponíveis para controle PI assim como frequências fixas ((P2201…) e potenciômetro motorizado (P2240) • MM420 possui apenas uma entrada analógica (provavelmente utilizada para o sinal de realimentação), portanto o setpoint deve ter outra fonte (p.e. frequências fixas, potenciômetro motorizado, interface serial, fixo, etc.) • MM420 possui recursos de controle limitados (p.e. PI somente) • MM440 possui escalamento de sinais e funções lineares e não lineares. JORGE BAEZ – IND 1 DT – CUR/FLO
Malha fechada com MICROMASTER MM4 Pontos Chave: • Leia as FAQ – na internet ou guias! • Utilize o diagrama de função. • Opere em malha aberta – meça a realiemtação e escale o sinal. • Use an oscilloscope to aid loop tuning - on 440 use automatic tuning. Parâmetros chaves: P2200 Habilita o controlador P2253 Fonte de Setpoint P2257,2258 Rampas de tempo P2264 Fonte de realimentação P2271 Tipo de transdutor P2350 Autotuning (MM440) JORGE BAEZ – IND 1 DT – CUR/FLO
Closed loop control with MICROMASTER MM440 Key Parameters: P0759= 20%, P0761=2 (transducer offset) P2240= 25 Setpoint Value (from MOP) P2253 = 2250 PID Setpoint from MOP P2264= 755.0 (source of PID feedback) P2350 = 1 (autotune) [P2280 = 0.37 P term] [P2285 = 0.057 I term] Low pressure pump Valve to set pressure Pressure meter Pressure transducer (behind drive) Feedback connection and supply to transducer Setpoint from BOP (PID MOP) JORGE BAEZ – IND 1 DT – CUR/FLO
Entrada Analógica 2 – Sensor de fumaça(e.g. CO) sensor P2264 = 755.1 Entrada Analógica 1 - Setpoint (Nível Seguro) P2253 = 755.0 Relê 1 Deteção de falha de transmissão / correia P2181 = 1; P0731 = 52.7 Relay 2 Máxima frequência alcançada P0732 = 52.A Relay 3 Falha P0733 = 52.3 Saída Analógica 1 – Sinal de realimentação P0771 index 000 = 755.1 Saída Analógica 2 – Corrente no Motor P0771 index 001 = 27 MM440 Instalação complexa – Extração de fumaça PID integrado e deteção de falha de transmissão mantem os gases a níveis seguros, também minimiza o consumo. Muitas saídas monitoram ajudando uma operação segura MM440 JORGE BAEZ – IND 1 DT – CUR/FLO
SAÍDA - PID FREQ. DESL % L/D AND 1 AND 2 AND 3 ENTRADA DIGITAL 1 FP-RS1 SET ACIONAMENTO FUNCIONANDO RES 1 1 NOT 2 NOT 1 APLICAÇÃO SANEPAR PI SLEEP – MM440 – sw2.05 r2294 TMR 1 r2886 r2852 CMP 1 r2811 P2889 P2831 P2813 722:0 P2841 LÓGICA PI SLEEP P0701 = 99 – HABILITA DIN1 PARA BICO P0840 = 2811 – LIGA / DESLIGA VIA AND1 P2800 = 1 – HABILITA BLOCOS LIVRES. P2801:0 = 1 – HABILTA PORTA AND 1 P2801:1 = 1 – HABILTA PORTA AND 2 P2801:2 = 1 – HABILITA PORTA AND 3 P2801:9 = 1 – HABILITA PORTA NOT 1 P2801:10 = 1 – HABILITA PORTA NOT 2 P2801:14 = 1 – HABILITA FP RS 1 P2802:0 = 1 – HABILITA TEMPORIZADOR TMR 1 P2802:12 = 1 – HABILITA COMPARADOR CMP 1 P2810:0 = 2852 – ENTRADA AND1 VIA TMR1 P2810:1 = 2841- ENTRADA AND1 VIA FP-RS 1 P2812:0 = 722:0 – ENTRADA AND2 VIA DIN1 P2812:1 = 2829 – ENTRADA AND2 VIA NOT 1 P2814:0 = 2831 – ENTRADA AND3 VIA NOT 2 P2814:1 = 52.2 – ENTRADA AND3 VIA AC. FUNC. P2828 = 52.2 – ENTRADA NOT1 VIA AC. FUNC. P2830 = 722.0 – ENTRADA NOT2 VIA DIN1. P2840:0 = 2813 – ENTRADA SET DO FP - AND2 P2840:1 = 2815 – ENTRADA RESET DP FP - AND3 P2849:0 = 2886 – ENTRADA TMR1 VIA CMP1 P2850 = 5 – VALOR DE TEMPORIZAÇÃO P2851 = 2 – TIPO ON/OFF DELAY P2885:0 = 2294 – ENTRADA CMP1 VIA PID P2885:1 = 2889 – ENTRADA CMP1 FREQ. DESL. 52:2 P2829 P2815 PARAMETRIZAÇÃO MOTOR P0010 = 1 – PARAMETRIZAÇÃO RAPIDA P0100 = 2 – MOTOR ABNT/IEC – 60Hz P0304 = 220 V – TENSÃO MOTOR P0305 = 18,5 A – CORRENTE MOTOR P0311 = 3520 RPM – VELOC MOTOR P0700 = 2 – CONTROLE VIA TERMINAIS P1000 = 2 – SETPOINT ANALOGICO P1300 = 2 – V/F PARABOLICO P3900 = 3 – FIM PARAM. RÁPIDA. OBS: AGUARDAR FIM DA PARAM. REGULADOR PI P0003 = 3 – ACESSA PARAMETROS NÍVEL 3 P2200 = 1 – HABILITA REGULADOR P2253 = 1 – MULTIPLICADOR SETPOINT P2255 = 50 – SETPOINT % P2264 = 755:0 – FEEDBACK P2280 = 1 – VALOR PROPORCIONAL P2285 = 1 – VALOR INTEGRAL P2293 = 10 s – RAMPA ACEL/DESACEL P2850 = 5 s – TEMPO HISTERESE LIGA/DESLIGA P2292 = 50 % - VALOR MÍNIMO DE FREQ. (30Hz) P2289 = 51 % - FREQ. DE DESLIGAMENTO (31Hz) Obs: Os parâmetros em negrito serão ajustados em campo
Controle de temperatura em frigoríficos Duto de ar frio Ambiente a ser refrigerado MM 420 Sensor de temperatura para a entrada analógica MM4 Feedback Setpoint Aplicações como esta permitem com o controlador PI uma solução extremamente favorável com relação a custos e pode ser implementada com poucos componentes externos Seletor de temperatura por potenciômetro motorizado JORGE BAEZ – IND 1 DT – CUR/FLO