Download
1 / 18
230 likes | 645 Views
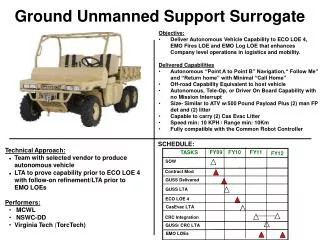
Autonomous Maritime Navigation (AMN) / Griffin Unmanned Surface Vessel (USV) Experimentation. Trident Warrior ‘10. AMN TW 10 Objectives. Overarching Objective:

E N D
Autonomous Maritime Navigation (AMN) / Griffin Unmanned Surface Vessel (USV) Experimentation Trident Warrior ‘10
AMN TW 10 Objectives • Overarching Objective: • Demonstrate autonomous flexibility by converting a standard Navy RHIB into an autonomous USV capable of cooperative autonomy in order to provide persistent surveillance and relevant information to the expeditionary commander via an adhoc expeditionary WAN. • Sub-objectives • Demonstrate multiple USVs are capable of accomplishing assigned mission(s) by executing flexible and sufficient cooperative autonomy mission behaviors • Demonstrate autonomous USVs can provide persistent surveillance and locate, identify and track contacts in accordance with assigned mission. • Demonstrate an autonomous USV capable of providing relevant,timely and accurate information to the expeditionary EC3 via an adhoc expeditionary WAN. • Demonstrate the flexibility of AMN sensor and autonomous capability by converting a standard Navy RHIB into an autonomous USV.
Autonomous Maritime Navigation (AMN) • OPERATIONAL NEED • Objective: Transition AMN autonomous control system module and multi-purpose sensor system for Navy Expeditionary Combat Command (NECC) autonomous USV operations (solo or cooperative) using existing and purpose built small boat inventory. • Value to Warfighter: Persistent ISR capability with no risk to personnel, reduction in required manpower and bandwidth costs over remote control operations. 11M RHIB Power Vent • PROPOSED SOLUTION • Technology: NASA Jet Propulsion Laboratory (JPL) robotics technologies and advanced algorithms for autonomous platform systems management, operation, and navigation, operational software and COTS/GOTS portable sensors. • Partners: NASA JPL, Marshall University, NSWCCD Carderock, OSD DDR&E RRTO, Spatial Integrated Systems • CAPABILITIES • Full autonomous capability for any Unmanned Surface Vessel (USV) enabled by an adaptable sensor module and an autonomy and fusion module • - Flexible Modules: Variable sensor mix and ruggedized container sizes • - Can make any vessel a USV in days • Use existing boat inventories • Adapt sensors and autonomous behaviors to fit operational needs
AMN SV-1 Link 16 RM to SIPR AMN C2 Center co- located with EC3 AMN Contacts in MSCT format with Correlating JPG Picture via internet to APAN unclas COP AMN Contacts & USV Location data via Sealancet Radio NECC JEC3 MSCT APAN / VRMTC-A unclas COP • NECC JEC3 US Classified Tactical picture Subscribe via internet APAN / VRMTC-A COI For AMN contacts Fused contact reports And JPG pictures via Sealancet radio In MSCT format Fused contact reports And JPG pictures via Sealancet radio in MSCT format Fused contact reports Via Sealancet Radio / MSCT sw Fused contact reports Via Sealancet radio/ MSCT sw Coalition Partners Coalition UNCLAS COP Boat-to-Boat comms Via Sealancet radios for Cooperative behavior AMN 1 AMN 2
AMN Fixed Oparea Patrol Mission with Gatekeeper • Mission: • AMN “A Fixed area patrol • Detect, track and report • AMN B will track and block any • Intruder in gatekeeper box • AMN A & B will swap missions • Via cooperative autonomy based • On tactical situation • 6 hour missions on 7 and 8 June Detect, track and Report A Gatekeeper B Track and Block Expeditionary Base / JEC3
MISSION DETAILS – Mission 1 • Fixed OPAREA patrol and goalkeeper / blocker for expeditionary base (6 hours) • Demonstrate harbor patrol activity • Persistent surface surveillance, as a subset of ISR • Real-time tactical picture with usable data for situational awareness and tactical responses • Blocking and deterring behavior
AMN High Value Unit (HVU) Escort Mission A • Mission: • AMN A and B escort HVU via an open ocean • And chokepoint transit • AMN A and B will track and block any intruder • Coming within 500 yds of HVU but 1 AMN • must remain with HVU at all times • AMN A and B will swap missions as tactical • Situation detects i.e 1 AMN will intercept • While second AMN continues escort • And when intercept and blocking • complete, AMN rejoin escort mission • Escort track is 24 nm , 4 nm of choke point • Escort track is run 2 times for 1 complete • mission • Escort missions run on 9 and 10 June A HVU B
MISSION DETAILS – Mission 2 • High value asset (HVA) littoral escort in a choke point area (4 hours) • Demonstrate escort capability • Exhibit roles in choke point area while escorting • Real-time tactical picture with usable data for situational awareness and tactical responses • Blocking and deterring behavior
USV Development Background: • Autonomous Maritime Navigation (AMN) has been under development since 2006. AMN began as a Congressionally funded Department of Navy, Navy Surface Warfare Center (NSWC) Carderock project. • Griffin is an Department of Defense Research and Engineering ( DDR&E) Rapid Response Technology Office (RRTO) project that leveraged Navy AMN capabilities and investment and funded cooperative autonomous capability • AMN / Griffin leverage NASA – Jet Propulsion Lab (JPL) Mars Rover technologyl • Autonomous. • AMN / Griffin is AUTONOMOUS – No human in the loop, no remote communications. Project premise is “If a USV can demonstrate completely autonomous behavior then remote control or “sliding autonomy” is comparatively trivial.”
Any boat can be a USV: • Four vessels have been currently converted: 40’ R&D boat, 35’ R&D boat, 7M RHIB and 11M RHIB • Fleet 11M RHIB in TW10 was converted to an autonomous USV in 1 week • It's not about the boat, hull or, engine performance - it's about the "brain" (software and sensors) and the learned behaviors. • "Minimum requirements" to retrofit a boat with AMN/Griffin is a controller area network interface ( CANBUS) that connects intelligent electronic devices to vehicle mechanical parts. • AMN / Griffin leverages as Canbus from the Program Executive Office for Littoral and Mine Warfare (PEO LMW MIW) USV acquisition program. More modern boats will convert to USVs quicker and at lower cost than having to digitally backfit all the old analog and mechanical systems. • Key attributes: • Agility, flexibility, robustness and portability • TW10: • Portable: converted a Fleet 11M RHIB to USV in 1 week • Robust: 11M RHIB operating in full autonomous mode after engine casualty • Flexible: Converted Fleet 11M RHIB USV doing cooperative autonomy with special built USV (Powervent) • Agile: Able to do multiple missions and swap missions “on the fly”
Vision: • Sensor suite and autonomous “brain” will be government furnished equipment (GFE) / government off the shelf (GOTS) and General Services Administration (GSA) schedule will have the sensor / autonomous brain system and integration services to support quickly converting ANY vessel into an autonomous USV • Next steps: autonomous USV with non-lethals performing a operational mission in a forward AOR
AMN Autonomy and Sensor Portability • Use existing boat inventories • No need for new platforms; save procurement $$$$ • No readiness ramp up; use existing parts inventory and trained maintenance crews • Mission flexibility • Adapt sensors and autonomous behaviors to operational needs X-BAND and KA RADARs DIGITAL NAUTICAL CHART DATABASE AIS GPS/IMU EO STEREO, ARRAY & 360 CAMERAS NASA CARACaS REAL-TIME CONTROL SYSTEM SENSOR FUSION TO COMMON TACTICAL PICTURE RUDDER AND THROTTLES LIDAR BOAT IQAN BUS ENGINE SENSORS IR SENSORS “Any” Surface Vessel • Full autonomous capability for ANY Unmanned Surface Vehicle (USV) enabled by an adaptable sensor module and an autonomy and fusion module • Flexible modules: Variable sensor mix and ruggedized container sizes • Can make any vessel a USV in days Sensor Module Autonomy & Fusion Module
Autonomous Maritime Navigation (AMN) “This is not Remote Control, this is not Scripted, this is Full Autonomy!”