Download
1 / 1
30 likes | 245 Views
ISOBlue – RTK GPS Breadboarding Team Team member: TJ Jasinski , Sam Amstutz , Yang Yan, Yang Wang Instructor: Aaron Ault and Prof. Krogmeier. A Simple Real Life Scenario:.

E N D
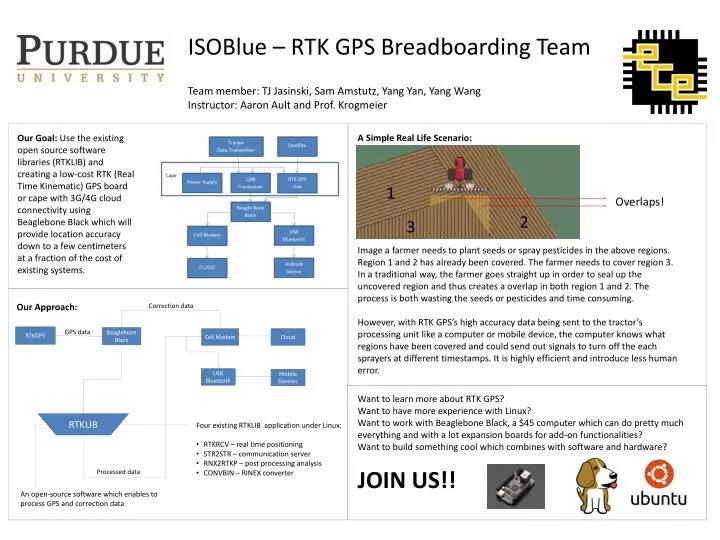
ISOBlue– RTK GPS Breadboarding Team Team member: TJ Jasinski, Sam Amstutz, Yang Yan, Yang Wang Instructor: Aaron Ault and Prof. Krogmeier A Simple Real Life Scenario: Our Goal: Use the existing open source software libraries (RTKLIB) and creating a low-cost RTK (Real Time Kinematic) GPS board or cape with 3G/4G cloud connectivity using Beaglebone Black which will provide location accuracy down to a few centimeters at a fraction of the cost of existing systems. 1 Overlaps! 2 3 Image a farmer needs to plant seeds or spray pesticides in the above regions. Region 1 and 2 has already been covered. The farmer needs to cover region 3. In a traditional way, the farmer goes straight up in order to seal up the uncovered region and thus creates a overlap in both region 1 and 2. The process is both wasting the seeds or pesticides and time consuming. However, with RTK GPS’s high accuracy data being sent to the tractor’s processing unit like a computer or mobile device, the computer knows what regions have been covered and could send out signals to turn off the each sprayers at different timestamps. It is highly efficient and introduce less human error. Our Approach: Correction data RTKGPS GPS data Beaglebone Black Cell Modem Cloud USB Bluetooth Mobile Devices Want to learn more about RTK GPS? Want to have more experience with Linux? Want to work with Beaglebone Black, a $45 computer which can do pretty much everything and with a lot expansion boards for add-on functionalities? Want to build something cool which combines with software and hardware? JOIN US!! RTKLIB • Four existing RTKLIB application under Linux: • RTKRCV – real time positioning • STR2STR – communication server • RNX2RTKP – post processing analysis • CONVBIN – RINEX converter Processed data An open-source software which enables to process GPS and correction data