Download
1 / 78
780 likes | 1k Views
Controllo del Moto. Controllo nello spazio dei giunti. Controllo del Moto. Controllo nello spazio operativo. Controllo nello spazio dei giunti. Determinare le n componenti di forza generalizzate tali che risulti :. A causa degli organi di trasmissione :. Matrice diagonale e costante.

E N D
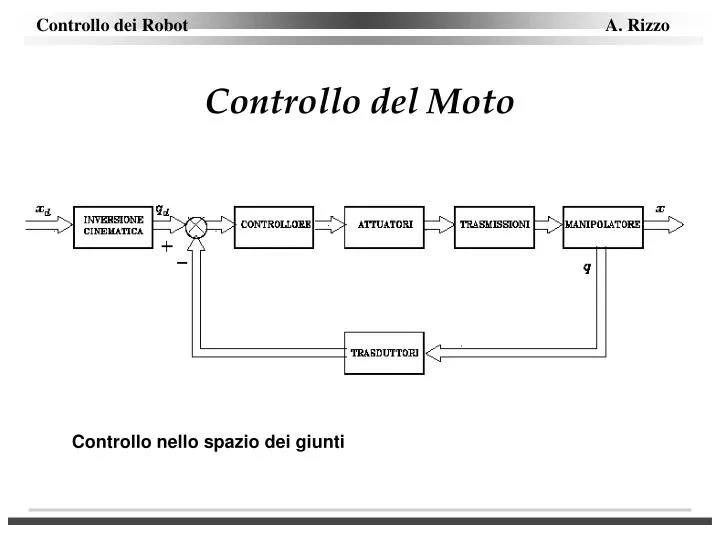
Controllo del Moto Controllo nello spazio dei giunti
Controllo del Moto Controllo nello spazio operativo
Controllo nello spazio dei giunti Determinare le n componenti di forza generalizzate tali che risulti : A causa degli organi di trasmissione : Matrice diagonale e costante
Controllo nello spazio dei giunti Sostituendo otteniamo : Dove : Attrito viscoso riportato all’asse del motore Disturbo = Contributo dipendente dalla configurazione
Controllo indipendente ai giunti il coefficiente d’attrito viscoso trascurabile rispetto al coefficiente d’attrito elettrico
Controllo indipendente ai giunti costante di guadagno velocità – tensione costante di tempo caratteristica del motore
Controllo in retroazione Un’efficiente riduzione degli effetti del disturbo d sull’uscita è assicurata da: · Un elevato guadagno degli amplificatori a monte del punto d’applicazione del disturbo; · La presenza, nel controllore, di un’azione integrale al fine di annullare, a regime ( costante), l’effetto della componente gravitazionale sull’uscita. PI = Proporzionale Integrale
Retroazione di posizione Blocco interno Ramo di azione diretta : Ramo di retroazione : H(s) = kTP
il sistema risulta intrinsecamente instabile il sistema risulta stabile
il sistema migliora notevolmente le sue caratteristiche di prontezza. Fdt a ciclo chiuso
Fdt disturbo-uscita Da essa si osserva che conviene aumentare KP in modo da ridurre l’influenza del disturbo sull’uscita durante il transitorio. Conviene tuttavia scegliere KP con valori non molto elevati, per evitare che al sistema di controllo siano assegnate caratteristiche di risonanza poco accettabili. Osserviamo, inoltre, che lo zero all’origine dovuto al controllore PI consente di annullare, quando è costante, gli effetti della gravità sulla posizione.
riportando l’anello di retroazione in velocità in parallelo all’anello di retroazione in posizione Fdt ramo diretto Fdt ramo in retroazione ponendo TV = Tm lo zero del controllore cancella gli effetti del polo reale del motore
Quindi, fissate le costanti di trasduzione kTPe kTV, si trova KV dalla prima eq. e successivamente KP dalla seconda equazione
Fdt ramo di azione diretta : Fdt ramo in retroazione :
Scelta dello zero : Oppure :
Stavolta le specifiche e il fattore di riduzione degli effetti indotti dal disturbo possono essere fissati indipendentemente.
Hardware per sistemi di controllo assi • DSP per motion control (HCTL1100,LM628/9) • Microcontrollori (MPC555, etc.) • Schede controllo assi (GALIL,PMD, etc.)
Microcontrollori MPC555
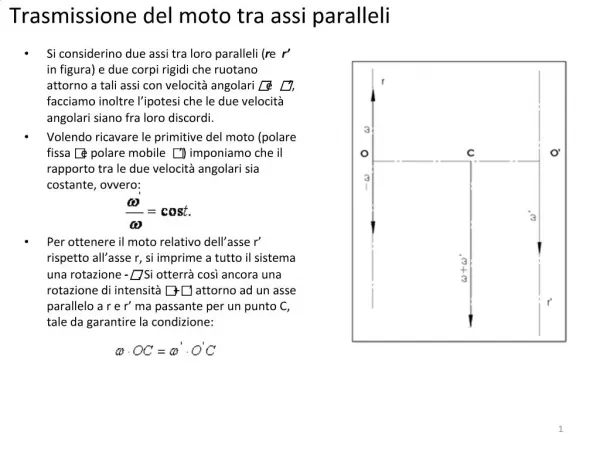
CONTROLLO CENTRALIZZATO Trasmissioni : Krq = qm Attuatori :
Sistema controllato in tensione Attrito viscoso meccanico e elettrico (matrice diagonale) Ingresso di controllo del sistema
Sistema controllato in coppia F = Fv u = KrKtGivc = ;
Controllo di sistemi non lineari Esempio : robot Scegliamo come variabili di stato :
Punto di equilibrio Esempio: Robot
Stabilità dell’equilibrio Un punto di equilibrio xe è stabile nel senso di Lyapunov se partendo abbastanza vicino a xe all’istante iniziale, lo stato vi resterà vicino negli istanti successivi. Asintotica stabilità : Globale asintotica stabilità : In tal caso può esserci un solo stato di equilibrio Uniforme stabilità : Indipendente da t (tempo invariante)
Stabile Instabile
Asintotica stabilità Globale asintotica stabilità
Teorema di Lyapunov Assumiamo che l’origine x=0è un punto di equilibrio : Intorno dell’origine L’origine è un punto di equilibrio STABILE se
Asintoticamente stabile se TEOREMA DI LASALLE Asintoticamente stabile se solo per x=0 Ed inoltre
Esempio Sistema lineare Data una P>0 soluzione di Con Q>0 E’ una funzione di Lyapunov, infatti
Controllo PD con compensazione di gravità Stato del sistema errore Funzione candidata di Lyapunov: Energia cinetica Energia potenziale elastica virtuale
Derivando Da Si ricava Sostituendo : Scegliendo : Nullo ! Proprietà di