Download
1 / 23
230 likes | 243 Views
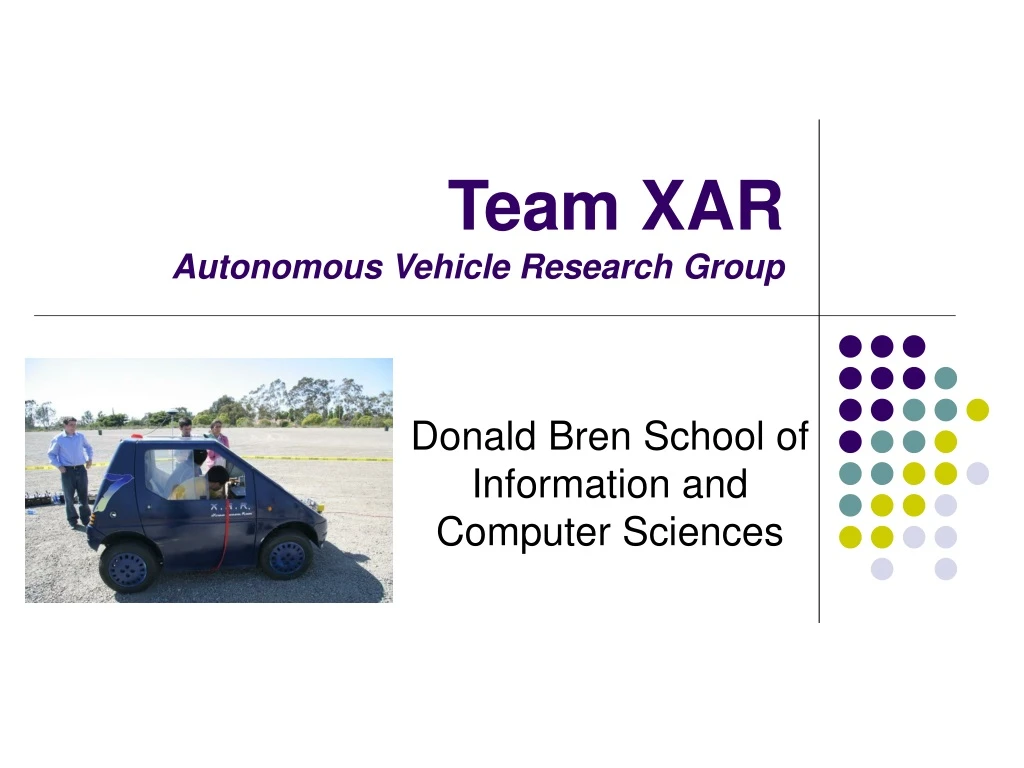
Join the XAR Autonomous Vehicle Research Group at Donald Bren School of Information and Computer Sciences to develop an autonomous platform for various applications, designed to operate in hazardous environments. Accomplishments include neural network obstacle avoidance and drive-by-wire modifications. Future goals involve enhancing hardware robustness and implementing more sensors for improved performance. From 3D mapping to crowd control, XAR is pioneering innovative solutions in autonomous technology.

E N D
Team XARAutonomous Vehicle Research Group Donald Bren School of Information and Computer Sciences
Faculty Advisors Professor Crista Lopes • Artificial Intelligence “Driver” Professor Tony Givargis • Embedded Systems & Robotics Professor Isaac Scherson • Electrical Engineering
Team Goals • Develop an autonomous platform for R&D • Platform that is robust, easily controllable by software, and can serve a wide range of applications • Platform that can replace humans in hazardous environments • Platform that can complement human efforts
Accomplishments • Developed a neural network obstacle avoidance system • Developed simulations • Modified electrical vehicle to become drive by wire • And most importantly….
Autonomous Driving Success • Started with simulations • First successful obstacle avoidance • GPS following and obstacle avoidance
Next Steps • Replace hardware to increase robustness, speed, accuracy, and power • Clean up architecture and recode rapidly prototyped, software components • Fuse more sensors together • Test Improve Apply
RESCUE Applications • 3D Mapping • Area Survey & Mapping • Transportation & Crowd Control
3D Mapping • Build virtual representation of the world • Start with sensor data from lidars, radars, sonars, etc. • Overlay fused sensor data with live feed from cameras • Build bird’s eye view for command control training
3D Mapping • Build virtual representation of the world • Start with sensor data from lidars, radars, sonars, etc. • Overlay fused sensor data with live feed from cameras • Build bird’s eye view for command control training
3D Mapping • Build virtual representation of the world • Start with sensor data from lidars, radars, sonars, etc. • Overlay fused sensor data with live feed from cameras • Build bird’s eye view for command control training
Area Survey & Mapping • Send vehicle to inspect an area • Deploy sensors • Create Signal coverage map • Create Hazardous areas map
Area Survey & Mapping • Sample Scenario: Saving the Science Lib. • A: Send Autonomous vehicle to inspect area • B: Vehicle builds virtual reality of the surroundings and sends them back • C: Vehicle deploys an array of sensors allowing for full wireless coverage while mapping out the hazards it comes across
Area Survey & Mapping • Sample Scenario: Saving the Science Lib. • A: Send Autonomous vehicle to inspect area • B: Vehicle builds virtual reality of the surroundings and sends them back • C: Vehicle deploys an array of sensors allowing for full wireless coverage while mapping out the hazards it comes across
Area Survey & Mapping • Sample Scenario: Saving the Science Lib. • A: Send Autonomous vehicle to inspect area • B: Vehicle builds virtual reality of the surroundings and sends them back • C: Vehicle deploys an array of sensors allowing for full wireless coverage while mapping out the hazards it comes across
Transportation & Crowd Control • Supply delivery • Transport disabled persons • Inform people that help is coming • Guide people to safer locations