Download
1 / 1
30 likes | 130 Views
3D->2D occlusion. Obstacle occlusion. A BAYESIAN HIERARCHICAL DETECTION FRAMEWORK FOR PARKING SPACE DETECTION. Ching-Chun Huang 1 ,3 , Sheng-Jyh Wang 1 , Yao-Jen Chang 2 ,3 , and Tsuhan Chen 3 1 Department of Electronics Engineering, National Chiao Tung University, Taiwan.

E N D
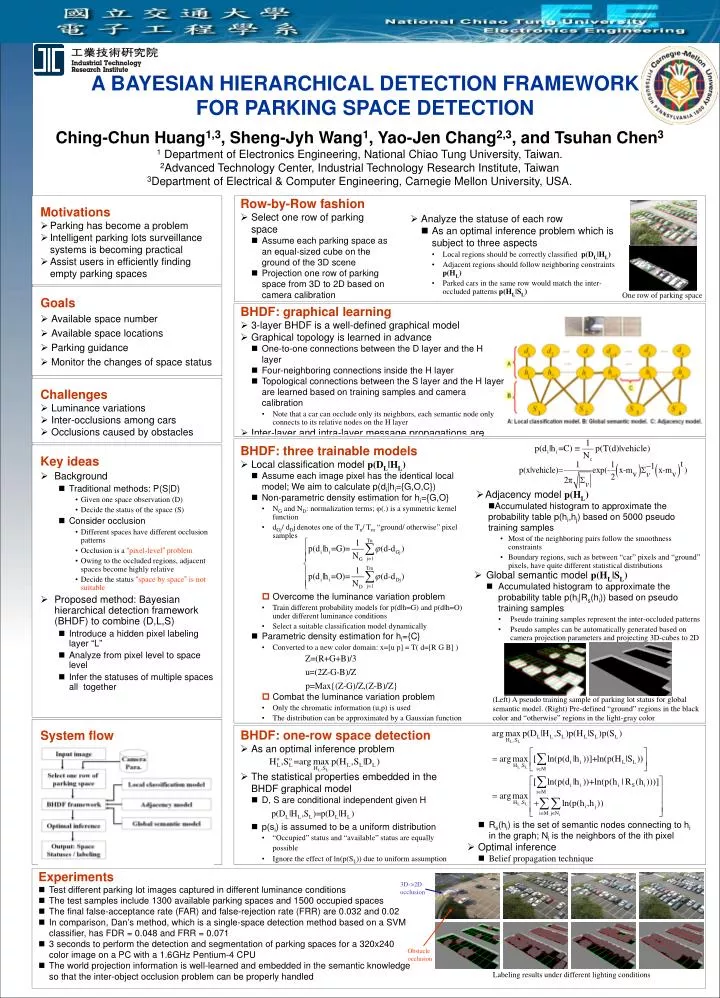
3D->2D occlusion Obstacle occlusion A BAYESIAN HIERARCHICAL DETECTION FRAMEWORK FOR PARKING SPACE DETECTION Ching-Chun Huang1,3, Sheng-Jyh Wang1, Yao-Jen Chang2,3, and Tsuhan Chen3 1 Department of Electronics Engineering, National Chiao Tung University, Taiwan. 2Advanced Technology Center, Industrial Technology Research Institute, Taiwan 3Department of Electrical & Computer Engineering, Carnegie Mellon University, USA. Row-by-Row fashion • Select one row of parking space • Assume each parking space as an equal-sized cube on the ground of the 3D scene • Projection one row of parking space from 3D to 2D based on camera calibration Motivations • Parking has become a problem • Intelligentparking lots surveillance systems is becoming practical • Assist users in efficiently finding empty parking spaces • Analyze the statuse of each row • As an optimal inference problem which is subject to three aspects • Local regions should be correctly classified p(DL|HL) • Adjacent regions should follow neighboring constraints p(HL) • Parked cars in the same row would match the inter-occluded patterns p(HL|SL) Goals • Available space number • Available space locations • Parking guidance • Monitor the changes of space status One row of parking space BHDF: graphical learning • 3-layer BHDF is a well-defined graphical model • Graphical topology is learned in advance • One-to-one connections between the D layer and the H layer • Four-neighboring connections inside the H layer • Topological connections between the S layer and the H layer are learned based on training samples and camera calibration • Note that a car can occlude only its neighbors, each semantic node only connects to its relative nodes on the H layer • Inter-layer and intra-layer message propagations are defined by using three trainable models (A,B,C) Challenges • Luminance variations • Inter-occlusions among cars • Occlusions caused by obstacles BHDF: three trainable models • Local classification model p(DL|HL) • Assume each image pixel has the identical local model; We aim to calculate p(di|hi={G,O,C}) • Non-parametric density estimation for hi={G,O} • NG and ND: normalization terms; (.) is a symmetric kernel function • dGj/ dDjdenotes one of the Tn/ Tm “ground/ otherwise” pixel samples • Overcome the luminance variation problem • Train different probability models for p(d|h=G) and p(d|h=O) under different luminance conditions • Select a suitable classification model dynamically • Parametric density estimation for hi={C} • Converted to a new color domain: x=[u p] = T( d=[R G B] ) • Combat the luminance variation problem • Only the chromatic information (u,p) is used • The distribution can be approximated by a Gaussian function Key ideas • Background • Traditional methods: P(S|D) • Given one space observation (D) • Decide the status of the space (S) • Consider occlusion • Different spaces have different occlusion patterns • Occlusion is a “pixel-level” problem • Owing to the occluded regions, adjacent spaces become highly relative • Decide the status“space by space” is not suitable • Proposed method: Bayesian hierarchical detection framework (BHDF) to combine (D,L,S) • Introduce a hidden pixel labeling layer “L” • Analyze from pixel level to space level • Infer the statuses of multiple spaces all together • Adjacency model p(HL) • Accumulated histogram to approximate the probability table p(hi,hj) based on 5000 pseudo training samples • Most of the neighboring pairs follow the smoothness constraints • Boundary regions, such as between “car” pixels and “ground” pixels, have quite different statistical distributions • Global semantic model p(HL|SL) • Accumulated histogram to approximate the probability table p(hi|Rs(hi)) based on pseudo training samples • Pseudo training samples represent the inter-occluded patterns • Pseudo samples can be automatically generated based on camera projection parameters and projecting 3D-cubes to 2D (Left) A pseudo training sample of parking lot status for global semantic model. (Right) Pre-defined “ground” regions in the black color and “otherwise” regions in the light-gray color BHDF: one-row space detection • As an optimal inference problem • The statistical properties embedded in the BHDF graphical model • D, S are conditional independent given H • p(si) is assumed to be a uniform distribution • “Occupied” status and “available” status are equally possible • Ignore the effect of ln(p(SL)) due to uniform assumption System flow • Rs(hi) is the set of semantic nodes connecting to hi in the graph; Ni is the neighbors of the ith pixel • Optimal inference • Belief propagation technique Experiments • Test different parking lot images captured in different luminance conditions • The test samples include 1300 available parking spaces and 1500 occupied spaces • The final false-acceptance rate (FAR) and false-rejection rate (FRR) are 0.032 and 0.02 • In comparison, Dan’s method, which is a single-space detection method based on a SVM classifier, has FDR = 0.048 and FRR = 0.071 • 3 seconds to perform the detection and segmentation of parking spaces for a 320x240 color image on a PC with a 1.6GHz Pentium-4 CPU • The world projection information is well-learned and embedded in the semantic knowledge so that the inter-object occlusion problem can be properly handled Labeling results under different lighting conditions