Download
1 / 19
200 likes | 391 Views
Princess Sumaya Univ. Electronic Engineering Dept. 3442 Industrial Instruments 2 Chapter 12 Control-Loop Characteristics. Dr. Bassam Kahhaleh. 12: Control-Loop Characteristics. Control System Configurations Single Variable Independent Single Variable. Flow rate Regulation.

E N D
Princess Sumaya Univ.Electronic Engineering Dept. 3442Industrial Instruments 2Chapter 12Control-Loop Characteristics Dr. Bassam Kahhaleh
3442 - Industrial Instruments 2 12: Control-Loop Characteristics Control System Configurations • Single Variable • Independent Single Variable Flow rate Regulation
3442 - Industrial Instruments 2 12: Control-Loop Characteristics Control System Configurations • Single Variable • Independent Single Variable • Interactive Single Variable Flow rate Regulation Temperature Regulation
3442 - Industrial Instruments 2 12: Control-Loop Characteristics Control System Configurations • Single Variable • Independent Single Variable • Interactive Single Variable • Compound Variable Example: Maintain A : B = 3 : 5
3442 - Industrial Instruments 2 12: Control-Loop Characteristics Control System Configurations • Cascade Control
3442 - Industrial Instruments 2 12: Control-Loop Characteristics Control System Configurations • Cascade Control Example:
3442 - Industrial Instruments 2 12: Control-Loop Characteristics Multivariable Control Systems • Analog Control Example: In a reaction vessel, two reactants are mixed, react, and the product is drawn from the bottom. The reaction rate is to be controlled. It is also important to keep the reaction temperature and vessel pressure below certain limits & The level is to be controlled at some nominal value.
3442 - Industrial Instruments 2 12: Control-Loop Characteristics Multivariable Control Systems • Analog Control • Supervisory & Direct Digital Control (DDC) May use self-adapting algorithms.
3442 - Industrial Instruments 2 12: Control-Loop Characteristics Control System Quality • Definition of Quality • Loop Disturbance Quality: the degree to which the deviations that result from the disturbances are minimized. Types: 1. Transient 2. Setpoint changes 3. Load change
3442 - Industrial Instruments 2 12: Control-Loop Characteristics Control System Quality • Definition of Quality • Loop Disturbance • Optimum Control Quality: 1. Stability 2. Minimum deviation 3. Minimum duration
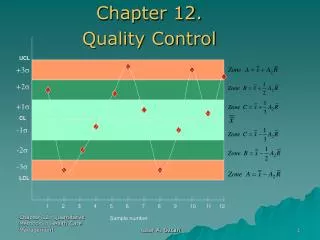
3442 - Industrial Instruments 2 12: Control-Loop Characteristics Control System Quality • Measure of Quality • Overdamped • Critically Damped • Underdamped • Quarter Amplitude • Minimum Area
3442 - Industrial Instruments 2 12: Control-Loop Characteristics Stability • Stability Criteria • A system is stable if the phase lag is less than 180° at the frequency for which the gain is unity. • A system is stable if the gain is less than one at the frequency for which the phase lag is 180 °
3442 - Industrial Instruments 2 12: Control-Loop Characteristics Process Loop Tuning • Open-Loop Transient Response Method • Known as Process-Reaction Method • Only for systems with self-regulation • Open the loop (No feedback) by disconnecting the controller’s output from the final element. • Introduce a transient disturbance by a small, manual change of the controlling variable using the final control element. • Measure the controlled variable (record it versus time).
3442 - Industrial Instruments 2 12: Control-Loop Characteristics Process Loop Tuning • Open-Loop Transient Response Method L: lag time in minutes N: reaction time (%/min)
3442 - Industrial Instruments 2 12: Control-Loop Characteristics Process Loop Tuning • Open-Loop Transient Response Method Proportional Mode: ¼ Amplitude: Proportional-Integral Mode: ¼ Amplitude:
3442 - Industrial Instruments 2 12: Control-Loop Characteristics Process Loop Tuning • Ziegler-Nichols Method • Known as Ultimate Cycle Method • Reduce any integral and derivative actions to their minimum effect. • Gradually begin to increase the proportional gain while providing periodic small disturbances to the process. • Note the gain KC at which the dynamic variable just begins to exhibit steady cycling (oscillations about the setpoint). • Note the critical period TC of these oscillations
3442 - Industrial Instruments 2 12: Control-Loop Characteristics Process Loop Tuning • Ziegler-Nichols Method Proportional Mode: Proportional-Integral Mode:
3442 - Industrial Instruments 2 12: Control-Loop Characteristics Process Loop Tuning • Frequency Response Method • If the phase lag is less than 140° at the unity gain frequency, the system is stable. • If the gain is 5 dB below unity (gain = 0.56) when the phase lag is 180°, the system is stable.
3442 - Industrial Instruments 2 12: Control-Loop Characteristics End of Chapter 12