Download
1 / 20
200 likes | 367 Views
Kinect for FRC 2012. Dan Rosenstein. Outline. Scope and Introduction Kinect hardware Kinect and FRC 2012 Kinect for Windows architecture Skeleton, audio and sensor data FRC Kinect architecture Programming Control considerations References and getting help Demo and questions. Scope.

E N D
Kinect for FRC 2012 Dan Rosenstein
Outline • Scope and Introduction • Kinect hardware • Kinect and FRC 2012 • Kinect for Windows architecture • Skeleton, audio and sensor data • FRC Kinect architecture • Programming • Control considerations • References and getting help • Demo and questions
Scope • Technology overview of Kinect for FRC 2012 • Focus on integration to FRC Driver Station • Beginners guide to Kinect • Supplement to official documentation
Introduction • Kinect launched for the Xbox 360 on 11/4/2010 • Xbox Launch Commercial • Kinect for Windows announced (2/21/2011) • Kinect for Windows Beta released (6/16/2011) • Kinect for FRC announced (10/6/2011) • You and FRC are at the cutting edge of technology! • Kinect Effect (11/3/2011)
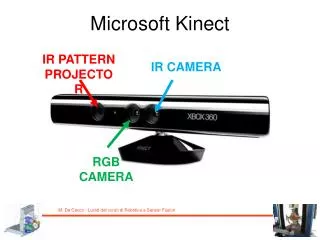
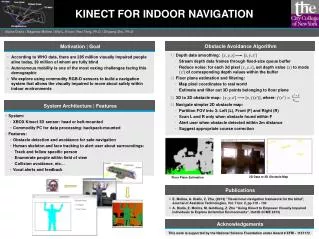
Kinect Hardware 3D DEPTH SENSORS RGB CAMERA MOTORIZED TILT MULTI-ARRAY MIC
Kinect and FRC 2012 • The Kinect has multiple powerful sensors for depth, skeleton, video and audio input • The Kinect is likely intended for robot control via the drivers station for the 2012 FRC game
Kinect Audio • Four microphone arraywith hardware-basedaudio processing • Multichannel echo cancellation (MEC) • Sound position tracking • Other digital signal processing (noise suppression and reduction)
FIRST Kinect Architecture Driver Station Robot
FIRST Kinect Architecture FRC Driver Station WPI Lib (Kinect Enabled) WPI Kinect Server Kinect for Windows SDK cRIO Kinect Driver Station Robot Joystick Position and Skeleton points
Programming • Teams using C# can change/modify the WPI Kinect Server on the Driver Station • Teams using LabView, Java or C++ can process joystick AND skeleton point data on the cRIO robot controller
Control Considerations • Robot control is achieved via skeletal position • Gestures/poses relate to skeletal position and inform which control is desired • Consider your gestures carefully! • Response times will be different with Kinect compared to traditional joysticks
Kinect for Windows References • SDK Quick Starts • Code Samples and Slide Presentations • Beta Launch Event Archive • More code samples and info • Gallery of Code Projects • Kinect projects, including useful libraries • Official Documents and Forums
Kinect FRC References • This presentation and video archive • FRC Beta Forums (Access is Limited) • YouTube • Team 341 • Team 1912 • Team 294 • Team 2169 • Team 238
Getting Help • FRC Forums • Public Kinect for Windows Forums • Escalate to Microsoft via official FIRST contacts
Demo and Questions • Go NeoBots, go!
FAQ • Can we put Kinect on the robot? • When can we put Kinect on the robot? • There is no FIRST rule (yet) officially stopping you from using the Kinect on the robot. That said, there is no software and direct hardware interface to integrate the Kinect and the cRIO.
Thanks! • NeoBots team #2903 • Dan Radion, Jim Bassett, Brett Sarver • WPI/FIRST • Brad Miller, Frank Merrick • FIRSTWA and Kevin Ross • Issaquah Robotics Society team #1318 • Microsoft • Aimee Sprung, Suzi LeVine, Stewart Tansley, Philip DesAutels, Alfred Thompson, John Gilbert