Download
1 / 23
240 likes | 359 Views
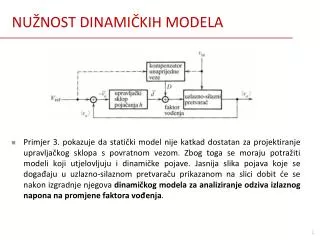
Identifikacija po dijelovima afinog modela procesa temeljena na uskupljavanju. Mario Vašak, Luka Mladenović, Nedjeljko Perić. E-mail: mario.vasak@fer.hr. Pregled predavanja. Po dijelovima afini (engl. Piecewise Affine, PWA) modeli – zašto?

E N D
Identifikacija po dijelovima afinog modela procesa temeljena na uskupljavanju Mario Vašak, Luka Mladenović, Nedjeljko Perić E-mail: mario.vasak@fer.hr The 31st Annual Conference of the IEEE Industrial Electronics Society, Rayleigh, North Carolina, USA, November 6-10, 2005
Pregled predavanja • Po dijelovima afini (engl. Piecewise Affine, PWA) modeli – zašto? • Identifikacija PWA modela procesa temeljena na uskupljavanju (engl. clustering) • Identifikacija PWA modela elektroničke zaklopke automobila The 31st Annual Conference of the IEEE Industrial Electronics Society, Rayleigh, North Carolina, USA, November 6-10, 2005
Modelsko prediktivno upravljanje (1/2) MPC regulator rk uk yk Proces xk • Optimalno upravljanje uz zadovoljenje svih ograničenja na procesne varijable (modelsko prediktivno upravljanje, MPC) • Zadatak upravljanja (kao i inače): ykrk • Dodatni zahtjev na sustav upravljanja: varijable stanja i ulazi procesa moraju se uvijek nalaziti u dozvoljenom području; Vremenski diskretni matematički model procesa: Ograničenja (zasićenje aktuatora, sigurnost, čuvanje komponenata sustava) The 31st Annual Conference of the IEEE Industrial Electronics Society, Rayleigh, North Carolina, USA, November 6-10, 2005
Modelsko prediktivno upravljanje (2/2) yk uk rk • Proračun optimalnog upravljačkog ulaza Trenutna mjerenja ili estimati stanja Predikcije stanja na temelju modela xk Funkcija cilja Upravljačka sekvenca planirana u trenutku k Linearna ili kvadratična vektorska norma • Minimiziranjem V uz zadovoljenje ograničenja proizlazi optimalna upravljačka sekvenca: • , cijeli postupak se ponavlja u k+1 The 31st Annual Conference of the IEEE Industrial Electronics Society, Rayleigh, North Carolina, USA, November 6-10, 2005
Zašto nam treba PWA model? - MPC • Ako je • Linearna – konveksno programiranje – postoje efikasni alati za rješavanje tog problema (npr. rješavači linearnih programa) • Općenito nelinearna – općenito nekonveksno programiranje – efikasni alati ne postoje • Po dijelovima afina (PWA) • - nekonveksno programiranje, ali rješava se kombinatorički koristeći konveksno programiranje – postoje efikasni alati za rješavanje tog problema D3 D4 D2 ako je D1 The 31st Annual Conference of the IEEE Industrial Electronics Society, Rayleigh, North Carolina, USA, November 6-10, 2005
Po dijelovima ARX (PWARX) modeli X3 X4 X2 X1 • Vremenski diskretni proces s PWARX prediktorom The 31st Annual Conference of the IEEE Industrial Electronics Society, Rayleigh, North Carolina, USA, November 6-10, 2005
Zašto identificirati PWA model? – dodatni razlozi • Cca. 80-90% vremena sinteze optimalnog regulatora otpada na dobivanje vjernog PWA modela procesa u vremenski diskretnoj domeni • Direktno linearizacija vremenska diskretizacija kontinuiranog nelinearnog modela nije upotrebljiva za veća vremena uzorkovanja – koja su poželjna pri sintezi radi skraćenja potrebnog predikcijskog horizonta (M) što pojednostavnjuje regulator • Identificirati vremenski diskretni PWA model direktno iz ulazno-izlaznih podataka • Ferrari-Trecate et al.: tehnika uskupljavanja (engl. clustering) za identifikaciju PWA preslikavanja The 31st Annual Conference of the IEEE Industrial Electronics Society, Rayleigh, North Carolina, USA, November 6-10, 2005
PWA identifikacija temeljena na uskupljavanju (1/4) [Ferrari-Trecate et al., Automatica, 2003] • Ulaz u algoritam identifikacije • Eksperimentalni podaci • Broj prošlih ulaza i izlaza u xk • Broj afinih submodela • Izlaz iz algoritma identifikacije • Procijenjeno PWA preslikavanje • Procijenjene granice greške modela The 31st Annual Conference of the IEEE Industrial Electronics Society, Rayleigh, North Carolina, USA, November 6-10, 2005
PWA identifikacija temeljena na uskupljavanju (2/4) LS okupi najbližih vektora za svaki u + Lokalizacija grupe Matrice kovarijanci Vektor svojstava grupe • Identifikacija lokalnih afinih submodela • Bliski regresijski vektori – vrlo vjerojatno pripadaju istom afinom submodelu The 31st Annual Conference of the IEEE Industrial Electronics Society, Rayleigh, North Carolina, USA, November 6-10, 2005
PWA identifikacija temeljena na uskupljavanju (3/4) K-means za • Uskupljavanje u skupina koristeći tzv. K-means algoritam, i to po: • sličnosti parametara • blizini grupa • pouzdanosti The 31st Annual Conference of the IEEE Industrial Electronics Society, Rayleigh, North Carolina, USA, November 6-10, 2005
Načelo algoritma uskupljavanja • Iterativan postupak • Odaberi početnu raspodjelu točaka u skupine, te proračunaj centre svake od skupina (srednja vrijednost uz otežanje R-1) • Na temelju proračunatih centara ponovno klasificiraj svaku točku u skupinu čiji joj je pripadni centar najbliži (udaljenost se uzima s otežanjem) • Ako se centri promijene više od određenog iznosa, ponavljaj od 1, inače gotovo The 31st Annual Conference of the IEEE Industrial Electronics Society, Rayleigh, North Carolina, USA, November 6-10, 2005
PWA identifikacija temeljena na uskupljavanju (4/4) • Koristeći bijekciju skupina paralelno postoji u prostoru • Parametri submodela estimiraju se primjenjujući LS metodu u svakoj skupini i • Poliedarska područja estimiraju se primjenom tzv. Multicategory Robust Linear Programming (MRLP) The 31st Annual Conference of the IEEE Industrial Electronics Society, Rayleigh, North Carolina, USA, November 6-10, 2005
Elektronička zaklopka • Regulira dotok zraka u motor s unutarnjim izgaranjem The 31st Annual Conference of the IEEE Industrial Electronics Society, Rayleigh, North Carolina, USA, November 6-10, 2005
Elektronička zaklopka • Regulira dotok zraka u motor s unutarnjim izgaranjem • Nelinearnosti • Trenje u reduktoru The 31st Annual Conference of the IEEE Industrial Electronics Society, Rayleigh, North Carolina, USA, November 6-10, 2005
Elektronička zaklopka • Regulira dotok zraka u motor s unutarnjim izgaranjem • Nelinearnosti • Trenje u reduktoru • Karakteristika povratne opruge (Limp Home, LH) The 31st Annual Conference of the IEEE Industrial Electronics Society, Rayleigh, North Carolina, USA, November 6-10, 2005
Modifikacije u algoritmu (1/2) Grupiranje s <0 <0 >0 >0 Vašak, Mladenović, Perić, IECON 2005 • Regresijski vektor • problem identifikacije trenja The 31st Annual Conference of the IEEE Industrial Electronics Society, Rayleigh, North Carolina, USA, November 6-10, 2005
Modifikacije u algoritmu (1/2) Vašak, Mladenović, Perić, IECON 2005 • Regresijski vektor • problem identifikacije trenja • Novi regresijski vektor • Linearna transformacija temeljena na a-priori poznavanju procesa The 31st Annual Conference of the IEEE Industrial Electronics Society, Rayleigh, North Carolina, USA, November 6-10, 2005
Modifikacije u algoritmu (1/2) Grupiranje s <0 <0 >0 >0 Vašak, Mladenović, Perić, IECON 2005 • Novi regresijski vektor • problem identifikacije trenja The 31st Annual Conference of the IEEE Industrial Electronics Society, Rayleigh, North Carolina, USA, November 6-10, 2005
Modifikacije u algoritmu (2/2) Vašak, Mladenović, Perić, IECON 2005 • MRLP estimira poliedarska područja • Koristi se jedan linearni program ...koji minimizira grešku uslijed krivo klasificiranih točaka: • Modifikacija: Ekstremalne točke umjesto svih The 31st Annual Conference of the IEEE Industrial Electronics Society, Rayleigh, North Carolina, USA, November 6-10, 2005
Rezultati identifikacije PWA modela elektroničke zaklopke (1/2) Raspored uskupljenih regresijskih vektora u 3D Identificirano trenje Identificirana karakteristika povratne opruge The 31st Annual Conference of the IEEE Industrial Electronics Society, Rayleigh, North Carolina, USA, November 6-10, 2005
Rezultati identifikacije PWA modela elektroničke zaklopke (2/2) – on-line • Validacija modela • Podaci za identifikaciju i validaciju prikupljeni u zatvorenoj petlji • On-line validacija The 31st Annual Conference of the IEEE Industrial Electronics Society, Rayleigh, North Carolina, USA, November 6-10, 2005
Rezultati identifikacije PWA modela elektroničke zaklopke (2/2) – off-line • Validacija modela • Off-line The 31st Annual Conference of the IEEE Industrial Electronics Society, Rayleigh, North Carolina, USA, November 6-10, 2005
Trenutni rad • Dizajn optimalnog regulatora na temelju identificiranog PWARX modela • Automatsko određivanje matrice linearne transformacije The 31st Annual Conference of the IEEE Industrial Electronics Society, Rayleigh, North Carolina, USA, November 6-10, 2005