Download
1 / 7
80 likes | 233 Views
Sandwich beams with piezoelectric layers. sensor. Elastic. Elastic core. Elastic. actuator. W e present, an analytical analysis in the case of a simply supported beam and a finite element analysis using Abaqus code. z. sensor. elastic. G. viscoelastic. x.

E N D
Sandwich beams with piezoelectric layers
sensor Elastic Elastic core Elastic actuator • We present, an analytical analysis in the case of a simply supported beam and a finite element analysis using Abaqus code.
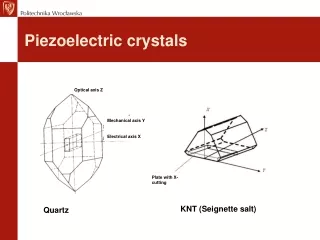
z sensor elastic G viscoelastic x The electric field of piezoelectric layers: Ez = as used in many studies(Gopinathan et al. 2000) elastic actuator *Hypothesis: Electric displacement depends on x. Thin piezoelectric layers with extension mechanism. Classical laminate theory is used. No slips occurs at the interfaces between layers. Materials are linear, homogeneous and isotropic. The core is conductive with an uniform potential fixed to zero.
*Kinematics: W = 0 T = Alembert principle H + T + W = 0 He = Hp = Hv = Elastic layers (e) Piezoelectric layers (p) Euler Bernoulli beam Viscoelastic layer (v) Timoshenko beam + Continuity conditions of displacement at the interfaces The core variables will be used: u, w, *Variational Formulation:
s depends on kinematics variables a = Gc s Direct proportional feedback control H + T = 0 u, w, and Gc *Control law - Sensor : D3s = 0 - Actuator : Control *Validation We’ve computed different value of Gc under Maple Software and have compared the frequency and damping obtained with a 2D F.E.A. supported by Abaqus.
*FEM with Abaqus support • Sandwiches with different, thickness layer, viscoelastic modulus and proportional feedback (Gc) were studied. Tab1:Frequency and damping ratios for different value of proportionnal feedback
Our analytical results are in good agreement with the F.E.A. under Abaqus. • Indeed the difference on frequency obtain analytically and with the FEM is under 0.1 % and the damping give good result too ( unless when damping is to weak ). • Limitation: • Under Abaqus the frequency and the damping were obtained using a direct frequency method. • Analytical analysis is possible only under simple boundary conditions. Shell piezoelectric element is needed