Download
1 / 62
620 likes | 681 Views
Develop technology supporting independent living for the aging population & Alzheimer's patients. Monitor activities, intervene before crises, improve healthcare through wearable sensors & AI. Transportation routines, significant places, & custom models personalized for each user. Technology funded by NSF, DARPA, MSR, Toyota for long-term monitoring in homes, workplaces, & communities. Activity Recognition using Dynamic Bayes Nets & Conditional Random Fields to predict, detect novel behaviors & user errors for better healthcare outcomes.

E N D
Dieter Fox University of Washington Department of Computer Science & Engineering
Joint work with Students: Brian Ferris, Julie Letchner, Lin Liao, Don Patterson, Alvin Raj, Amarnag Subramanya, Danny Wyatt UW faculty: Jeff Bilmes, Gaetano Borriello, Henry Kautz Intel Research Seattle: Tanzeem Choudhury, Matthai Philipose Funded by NSF, DARPA, MSR, Toyota 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 2
U.S. by 2050: 80 million people over age 65 and 13-16 million Alzheimer's patients Goal: Develop technology to Support independent living by people with cognitive disabilities ▪ At home ▪ At work ▪ Throughout community Improve health care ▪ Long term monitoring of activities of daily living (ADL’s) ▪ Intervention before a health crisis 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 3
Transportation routines via Dynamic Bayes Nets Significant places via Conditional Random Fields Activity recognition projects Discussion 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 4
[Liao-Fox-Kautz: AAAI-04, AIJ-07] Given data stream from a wearable GPS unit Infer the user’s location and mode of transportation (foot, car, bus, bike, ...) Predict where user will go Detect novel behavior / user errors 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 5
Dead and semi-dead zones near buildings, trees, etc. Sparse measurements inside vehicles, especially bus Multi-path propagation Inaccurate street map … 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 6
Map is directed graph Location: Edge e Distance d from start of edge Prediction: Move along edges according to velocity model Correction: Update estimate based on GPS reading 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 7
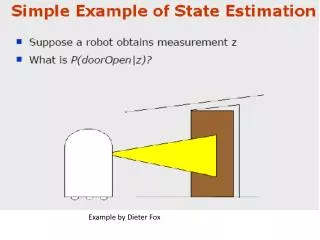
xk-1 xk Edge, velocity, position zk-1 zk GPS reading Time k Time k-1 Task: Estimate posterior over hidden states 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 8
e1 x k-1 e3 ? e2 e0 ? Problem: Predicted location is multi-modal 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 10
e1 x k zk e3 e2 Problem: GPS reading is not on the graph 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 11
x k e1 x if =e1 q k zk e3 e2 Problem: GPS reading is not on the graph 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 12
e1 x k zk x k e3 if =e2 q e2 Problem: GPS reading is not on the graph 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 13
ek-1 ek Edge transition xk-1 xk Edge, velocity, position GPS association θ k θ k-1 zk-1 zk GPS reading Time k Time k-1 Task: Estimate posterior over all hidden states 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 14
STREET MAP Source: Tiger / Line data BUS ROUTES / STOPS Source: Metro GIS RESTAURANTS / STORES Source: MS MapPoint 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 15
Represents posterior by sets of weighted particles: , { s S k ( ) ( ) i i , ,..., 1 } w i n Basic idea: Sample some variables of state space and solve other variables analytically conditioned on samples Here: Each particle contains Kalman filter for location: , , v e s ( ) ( ) ( ) ( ) ( ) 2 i i i i i , ( , ) N KF for position Edge transitions, velocities, edge associations Update sets by sampling procedure (SISR) 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 16
GPS measurements Particles (Kalmanfilters) 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 17
mk-1 mk Transportation mode xk-1 xk Edge, velocity, position zk-1 zk GPS reading Time k Time k-1 ( , ( ) i ( ) i ( ) i ( ) i ( ) i ( ) i 2 , , , , ) s m e v N Particles: 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 18
Encode prior knowledge into the model Modes have different velocity distributions Buses run on bus routes Get on/off the bus near bus stops Switch to car near car location 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 19
Measurements Projections Bus mode Car mode Foot mode Green Red Blue 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 20
A B Workplace Goal (destination): workplace (home, friends, restaurant, ...) Trip segments: <start, end, transportation> Home to Bus stop A on Foot Bus stop Ato Bus stop B on Bus Bus stop B to workplace on Foot 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 21
[Liao-Fox-Kautz: AAAI-04, AIJ-07] gk-1 gk Goal tk-1 tk Trip segment mk-1 mk Transportation mode xk-1 xk Edge, velocity, position zk-1 zk GPS reading Time k Time k-1 [Bui-Venkatesh-West: JAIR-02] ( ) i ( , ( ) i ( ) i ( ) i ( ) i ( ) ( ) i 2 i , , , , , , ) s g t m e v N Particles: 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 22
Customized model for each user Key to goal / path prediction and error detection Use low level model to learn variable domains Goals: locations where user stays for long time Transition points: locations with high mode transition probability Trip segments: connecting transition points or goals Use full model to learn parameters Transition probabilities (goals, trips, edges) via EM 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 23
Predicted goal Predicted path 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 24
GOING TO THE WORKPLACE GOING HOME High probability transitions: bus car foot 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 25
0.5 0.5 5 43 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 26
[Patterson-Liao-etAl: Ubicomp-04] bk-1 bk Behavior mode normal / unknown / error gk-1 gk Goal tk-1 tk Trip segment mk-1 mk Transportation mode xk-1 xk Edge, velocity, position zk-1 zk GPS reading Time k Time k-1 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 27
573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 28
Untrained flat model Trained model Instantiated model 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 29
573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 30
Transportation routines via Dynamic Bayes Nets Significant places via Conditional Random Fields Activity recognition projects Discussion 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 31
[Liao-Fox-Kautz: NIPS-05,IJCAI-05,IJRR-07] So far No distinction between different types of goals Model not transferable to other person Goals learned solely based on duration 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 32
Friend Restaurant Work Home Bus stop Parking Bus stop Store 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 33
Undirected graphical model Introduced for labeling sequence data [Lafferty-et al: ICML-01] No independence assumption on observations! Trained discriminatively from labeled data Applied successfully to Natural language processing [McCallum-Li: CoNLL-03], [Roth-Yih: ICML-05] Computer vision [Kumar-Hebert: NIPS-04], [Quattoni-Collins-Darrel: NIPS-05] Robotics [Limketkai-Liao-Fox: IJCAI-05], [Friedman-Pasula-Fox: IJCAI-07] 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 34
ConditionalRandomFields x Hidden states x k 1 Observations z Posterior factorizes into log-linear clique potentials 1 ( | ) ( , ( ) c C Z z 1 ( ) z T c c C x z x z w x z ) exp f ( c , ) p c c c c c Z Local potentials link states to observations / features Neighborhood potentials link states to neighboring states 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 35
ConditionalRandomFields x Hidden states x k 1 Observations z Posterior factorizes into log-linear clique potentials 1 ( | ) ( , ( ) c C Z z 1 ( ) z T c c C x z x z w x z ) exp f ( c , ) p c c c c c Z Local potentials link states to observations / features Neighborhood potentials link states to neighboring states 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 36
ConditionalRandomFields x Hidden states x k 1 Observations z Posterior factorizes into log-linear clique potentials 1 ( | ) ( , ( ) c C Z z 1 ( ) z T c c C x z x z w x z ) exp f ( c , ) p c c c c c Z Partition function Weights Feature functions Local potentials link states to observations / features Neighborhood potentials link states to neighboring states 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 37
Conditional distribution parameterized via weights w: 1 ( | , ) exp ( , ) c C Z z w T c x z w w x z f ( c , ) p c c Maximize conditional log-likelihood with shrinkage prior: T log ( | , ( ) ) L p w w w x z w 2 Maximization via stochastic / conjugate gradient, L-BFGS Alternative: maximize pseudo log-likelihood [Besag: 1975] T w w log ( w x x w PL( ) |MB( ), ) p i i 2 i 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 38
BP computes posteriors via local message passing Sum-product for posterior .... Max-product for MAP .... Exact if network has no loops Otherwise, run loopy belief propagation and hope it works Alternatives: ICM, graph-cut, MCMC, … 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 39
Temporal pattern: duration, time of day, etc. Geographic evidence: is there a restaurant / store / bus stop nearby? Transition relation: adjacent activities Spatial feature: relation between place and activity Summation constraint: number of places labeled home or workplace 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 40
[Liao-Fox-Kautz: NIPS-05] Activity sequence walk, drive, ride bus, work, visit, sleep, pickup, get on/off bus … a1 a2 a3 a4 a5 aN-2 aN-1 aN … GPS trace 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 41
[Liao-Fox-Kautz: NIPS-05] Global, soft constraints # homes, workplaces h w Significant places home, work, bus stop, parking lot, friend’s home … p1 p2 p3 pK Activity sequence walk, drive, ride bus, work, visit, sleep, pickup, get on/off bus … a1 a2 a3 a4 a5 aN-2 aN-1 aN … GPS trace Two weeks data (> 50,000 gps points) Inference: loopy BP (10 minutes); Learning: Pseudo-likelihood (3 minutes) 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 42
Generalize from people with labeled data to others without labeled data User1 Supervised learning Training data Generic model Other users User2 Shared parameters User3 Relational Markov Networks to specify CRFs and parameter sharing via templates [Taskar-Abbeel-Koller: UAI-02] 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 43
573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 44
573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 45
573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 46
Cross-validation using data from 4 persons 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 47
573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 48
Transportation routines via Dynamic Bayes Nets Significant places via Conditional Random Fields Activity recognition projects Discussion 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 49
[Ferris-Haehnel-Fox: RSS-06] 573 AU-08 Dieter Fox: Activity Recognition From Wearable Sensors 50