Download
1 / 1
10 likes | 123 Views
Required DOF Change. Thrust Input. Force & Position Feed Back. Controller. Vehicle model. Force Sensors / Instrumentation. Strain gage. Current Meter. U-PHINS. Station Keeping Control. INDIAN INSTITUTE OF TECHNOLOGY MADRAS Department of Engineering Design

E N D
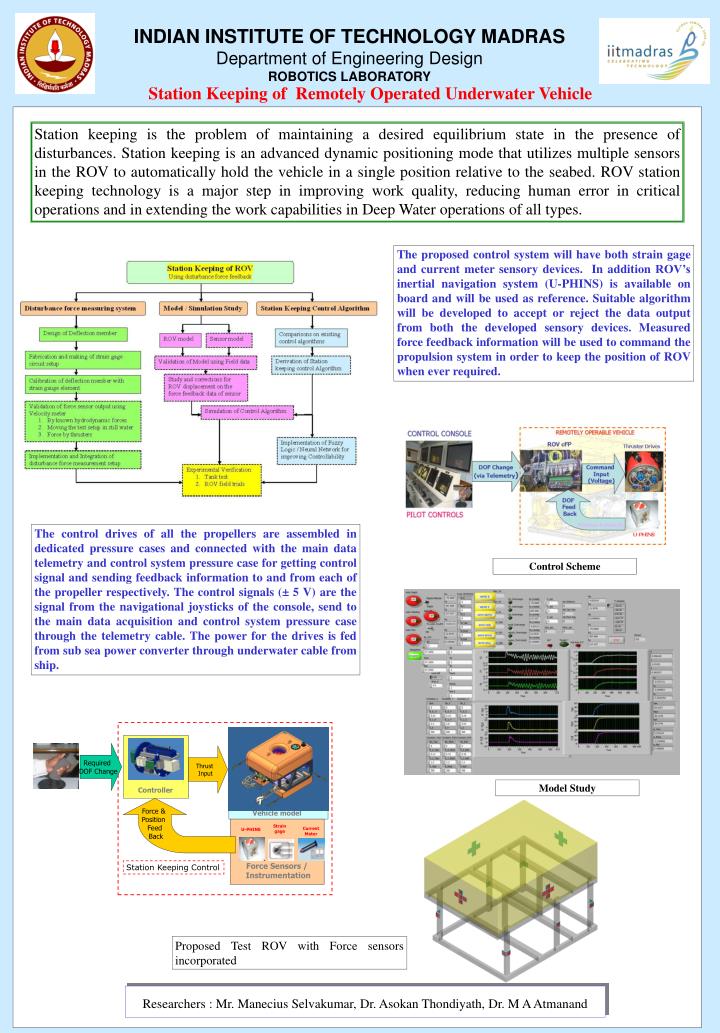
Required DOF Change Thrust Input Force & Position Feed Back Controller Vehicle model Force Sensors / Instrumentation Strain gage Current Meter U-PHINS Station Keeping Control INDIAN INSTITUTE OF TECHNOLOGY MADRAS Department of Engineering Design ROBOTICS LABORATORY Station Keeping of Remotely Operated Underwater Vehicle Station keeping is the problem of maintaining a desired equilibrium state in the presence of disturbances. Station keeping is an advanced dynamic positioning mode that utilizes multiple sensors in the ROV to automatically hold the vehicle in a single position relative to the seabed. ROV station keeping technology is a major step in improving work quality, reducing human error in critical operations and in extending the work capabilities in Deep Water operations of all types. The proposed control system will have both strain gage and current meter sensory devices. In addition ROV’s inertial navigation system (U-PHINS) is available on board and will be used as reference. Suitable algorithm will be developed to accept or reject the data output from both the developed sensory devices. Measured force feedback information will be used to command the propulsion system in order to keep the position of ROV when ever required. The control drives of all the propellers are assembled in dedicated pressure cases and connected with the main data telemetry and control system pressure case for getting control signal and sending feedback information to and from each of the propeller respectively. The control signals (± 5 V) are the signal from the navigational joysticks of the console, send to the main data acquisition and control system pressure case through the telemetry cable. The power for the drives is fed from sub sea power converter through underwater cable from ship. Control Scheme Model Study Proposed Test ROV with Force sensors incorporated Researchers : Mr. Manecius Selvakumar, Dr. Asokan Thondiyath, Dr. M A Atmanand