Download
1 / 1
10 likes | 88 Views
INDIAN INSTITUTE OF TECHNOLOGY MADRAS Department of Engineering Design ROBOTICS LABORATORY. OBSTACLE AVOIDANCE AND DYNAMIC PATH PLANNING OF AUTONOMOUS UNDERWATER VEHICLE IN 3D SPACE. Research Objective.

E N D
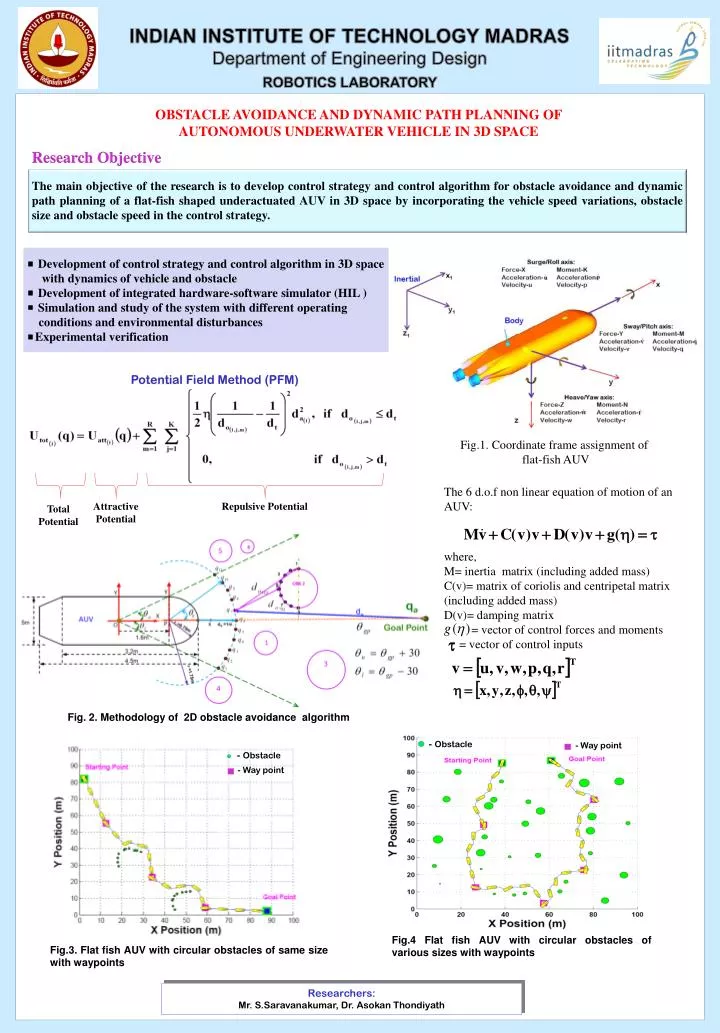
INDIAN INSTITUTE OF TECHNOLOGY MADRAS Department of Engineering Design ROBOTICS LABORATORY OBSTACLE AVOIDANCE AND DYNAMIC PATH PLANNING OF AUTONOMOUS UNDERWATER VEHICLE IN 3D SPACE Research Objective The main objective of the research is to develop control strategy and control algorithm for obstacle avoidance and dynamic path planning of a flat-fish shaped underactuated AUV in 3D space by incorporating the vehicle speed variations, obstacle size and obstacle speed in the control strategy. Development of control strategy and control algorithm in 3D space with dynamics of vehicle and obstacle Development of integrated hardware-software simulator (HIL ) Simulation and study of the system with different operating conditions and environmental disturbances Experimental verification Potential Field Method (PFM) Fig.1. Coordinate frame assignment of flat-fish AUV The 6 d.o.f non linear equation of motion of an AUV: where, M= inertia matrix (including added mass) C(v)= matrix of coriolis and centripetal matrix (including added mass) D(v)= damping matrix = vector of control forces and moments = vector of control inputs Attractive Potential Repulsive Potential Total Potential Fig. 2. Methodology of 2D obstacle avoidance algorithm - Obstacle - Obstacle - Way point - Way point Fig.3. Flat fish AUV with circular obstacles of same size with waypoints Fig.4 Flat fish AUV with circular obstacles of various sizes with waypoints Researchers: Mr. S.Saravanakumar, Dr. Asokan Thondiyath