Download
1 / 35
350 likes | 487 Views
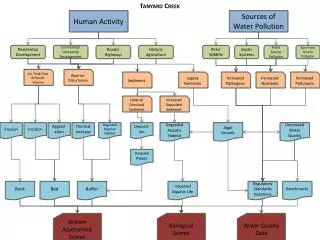
Agent Oriented theory of Human Activity. Thesis: Craig Rindt (Chapter 3). The general “Aim”. Apply Agent-based modeling techniques to general activity systems theory to model human travel behavior. What is Activity Systems theory?

E N D
Agent Oriented theory of Human Activity Thesis: Craig Rindt (Chapter 3)
The general “Aim” • Apply Agent-based modeling techniques to general activity systems theory to model human travel behavior. • What is Activity Systems theory? • People’s travel behavior can be understood in the context of activities they want to do.
Definitions • Activity • Episode = Discrete event occurring over time. • Trajectory = actual behavior over time. • Pattern = Analytical description of trajectory in time and space. • Action space = Set of actions that are feasibly reached over space and time. • Calendars = demands to engage in activities • Programs = Agenda of activities that must be performed • Schedules = Planned trajectory that an individual decides.
Various theories on Activity systems analysis • Theory 1(Constraints) • States that Human behavior is a constrained trajectory through time and space. • Types of Constraints • Capability constraints arising due to physical limitations • Coupling constraints arising from interactions • Authority constraints define personal control of resources e.g. I cannot shop at a store if it is closed
Theory2 (Motivation) • Concentrates on propensity factors that drives humans to do stuff. • Not articulated properly and a lot of different cases exist. • Main Idea: Human behavior in space is characterized by the motivation to participate in various activities.
Theory 3 and 4 • Balancing “Motivation and Constraints” • Neither all activities nor all constraints are equal in the eyes of the actor or a weighted theory. • Adaptation • Individual is situated in an environment that both motivates and constrains his behavior.
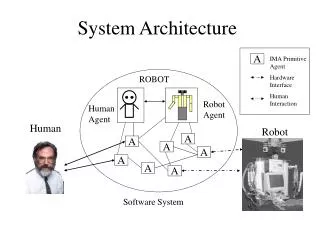
Idea in the thesis • Combine the theories just described with Agent based modeling philosophy. • Agent-based View • A Human-agent occupies a universe filled with other agents. • Agent’s knowledge gained solely through sensors. • Effectors • Achieve GOALS by interaction with other agents.
Activity as Interaction • The agent-based view states that the behavior of an agent depends upon the interaction it has with the other agents. => Activity = Interaction • Thus, Human Activity can be viewed as both mechanism of constraint and source of motivation.
Defining the Human Agent • Some Assumptions: Assume you can synthesize a population of agents in an urban environment by using some techniques. • Such a technique also specifies the social structure and things like physical proximity. • Now, we seek to produce for each agent, the following time-varying vector: • Y(t)= [XL(t),XC(t),XA(t)]’ • XL, XC and XA stand for location, social impact and interaction respectively
Representing dynamics • Y(t)=[XL(t),XC(t),XA(t)]’ =[f(XL(t-1),XA(t-1)),f(XC(t-1),XA(t-1)),f(R(t-1),P(t-1))] R(t): Resources available to the agent at time t. P(t): Agent’s plan.
Specifying Resources or Interfaces • View: • The resources available effectively define the channels upon which an individual can interact with the environment to engage in an activity. • Each agent therefore has an interface that it presents to other agents which represents the types of interactions it can have. • R(t) = f(XL(t),XC(t),L(t), T(t),C(t)) • L(t), T(t) and C(t) are the land-use system, the transportation system and the socio-cultural system respectively.
So What? • The goal of activity and travel forecasting is to predict this trajectory Y over time. (Economic models) • The goal of transportation science is to describe and understand how human behavior produces the trajectory. (Learning problem) • The behavior is dependent on the plan P: • P(t)=f (P(t-1), XL,XC,E(t)) • where E(t)= (L(t),T(t),C(t)) is the environment.
Specifying Agent internals • Assume that the environment is enumerable E= (e1,e2,……). • The Agent has only partial knowledge of the world and so it considers the environment as R = (r1,r2,r3….). • ri is a subset of E. • Define two functions, • f: E → M (Sensory input to form messages) • f: M → R (messages encoded to develop a perspective of the world)
Action-space and Agent’s view of the Action space • Same as Sensory input. • Available Actions S (s1,s2,….) • Agents view: A(a1,a2….) • ai is a subset of S. • To summarize: E and R define the possible states of the objective world and the agent's ability to perceive that world. • S and A define the universe of possible actions and the agent's subjective knowledge of them.
Completing the Agent description • Interpretation. • attribute a causal sense to the perceived world according to the agent's experience • f: H → I (Historical information to Interpretation) • Decisions • f: I → A (Interpretation to activities) • Assessing response for Actions through sensors. • F: E x S → E
Completing the Agent description • Agent’s utility functions • U = Z(I,B) where U is a Real number. • Z can be interpreted as the agent's utility function, with B defining the utility weights and I defining the perceived values of the relevant attributes. • Pay-off functions. • f: I X A → U • which is a mapping from the universe of possible interpretation-action combinations to some payoff measure in a range of utilities U.
Learning • 4 Levels • Learning about the states of the world (improving perception) • Increase or decrease states in R. • Learning About the Opportunity Space • Increase or decrease states in A. • Learning About Interpretations of Historical Trajectories • Learning About the Decision Rules
Summary • The focal agent is the human being, who is relationally situated to physical and social hierarchies that both motivate and constrain his behavior. • This behavior is limited to interactions with other agents (people, institutions etc) from which the person derives some environmental payoff. • Interactions can be conceived as a “negotiation process” which is the next chapter in the thesis.
Chapter 4 The Micro-simulation Kernel
Introduction • Recap: Human Activity involves the interactive exchange of resources between individuals. • View this as “Negotiation” • Negotiation is driven by physical and social laws. • Develop model according to this criteria and also try to reduce its complexity.
Design of Activity Negotiated Kernel • Use Distributed Problem solving architecture (DPS) • Model a urban system as a multi-agent system where agents represent people, institutions and places. • Use an event-driven discrete model because the number of activities is not likely to exceed 50.
DPS and Contract Net Protocol (CNP) • How to view DPS as negotiation based protocol (Davis and Smith 1983)---Ans:CNP. • Problems in DPS • Each agent has an incomplete local knowledge • Synchronize behavior so that agents don’t interfere with actions of other agents.
Activity engagement as DPS • Turn the CNP argument on its head. • Activity engagement is the process used to solve the problem of activity completion. • Problems: • No centralized problem solver in human activity negotiation. • Solution: • View the task manager as an abstraction that represents the logic representing how physical and social constraints affect the laws of the environment.
Additions to CNP for Travel Domain • Contracts involving multiple agent • Non-binding contracts • Terminate some activity at will. • Binding Contracts • E.g. Travel activities using Rail • Simultaneous Activities