Download
1 / 8
80 likes | 241 Views
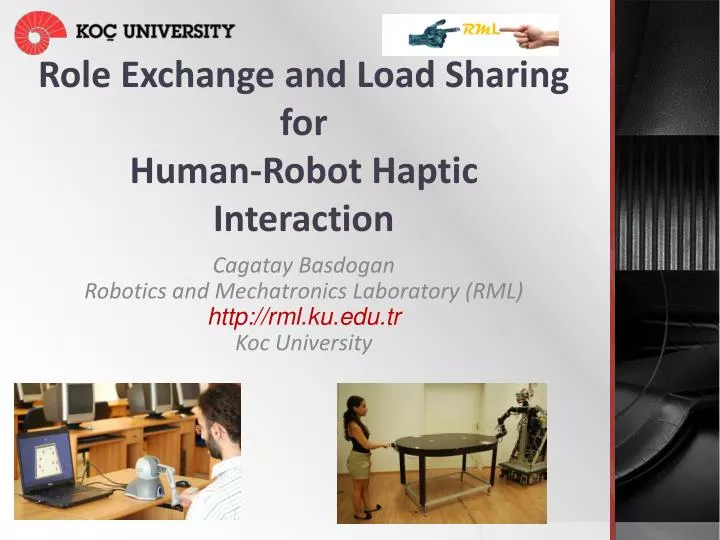
Role Exchange and Load Sharing for Human-Robot Haptic Interaction. Cagatay Basdogan Robotics and Mechatronics Laboratory (RML) http://rml.ku.edu.tr Koc University. Motivation :

E N D
Role Exchange andLoadSharingfor Human-Robot Haptic Interaction CagatayBasdogan Roboticsand Mechatronics Laboratory (RML) http://rml.ku.edu.tr KocUniversity
Motivation: • Even though robots can be programmed to share control with human operators to perform a task, the interaction in such systems is still artificial when compared to natural human-human cooperation. = Why?
Motivation: Home Factory Hospital
Why? • Adaptation to human needs: • Intuitive, natural, andmultimodal communication • Intention recognition and expression • Understandingpersonaltraits • Role allocationandloadsharing • Negotiationandconflictresolution
PHYSICAL WORLD: VIRTUAL WORLD: Kucukyilmaz, A., Sezgin, T.M., Basdogan, C., 2013, "Intention Recognition for Dynamic Role Exchange in Haptic Collaboration", IEEE Transactions on Haptics, Vol. 6, No. 1, pp. 58-68. Mortl, A., Lawitzky, M., Kucukyilmaz, A., Sezgin, M., Basdogan, C., Hirche, S., 2012, "The Role of Roles: Physical Cooperation between Humans and Robots", International Journal of Robotics Research, Vol. 31, No. 13, pp. 1656-1674.
ArtworkbyKaryaBaşdoğan 7 PhD, 5 MS
Acknowledgement:Ayşe Kücükyılmaz (PhDStudent, KocUniv.)Özgur Oğuz (MS Student, KocUniv.)Alexander Mörtl (PostDocFellow, TUM)Martin Lawitzky (PhDStudent, TUM)Prof. Metin Sezgin (KocUniv.)Prof. Sandra Hirche (TUM) Alumni: AyseKucukyilmaz (ImperialCollegeLondon), Özgür Oğuz (IIT/Italy), Nuray Dindar(UBC/Canada), Berkay Yarpuzlu(Ford Otosan R&D), Yunus Has (SAGE), Selman Cebeci (Ford Otosan R&D), Sina Öcal (Eczacıbaşı), Umut Özcan (Ford Otosan R&D) Bilal Örün (İpek Kağıt), Mert Sedef (UNC, MimicTech/USA), Aydin Varol (EPFL), NesraYannier (CMU), Erk Subaşı (ETH), İhsan Günev (Ford Otosan ArGe), İbrahim Bukusoglu (Ford Otosan R&D), Cengiz Öztireli (ETH), Evren Samur (EPFL, nowFacultyMember at BogaziçiUniv.), Sertaç Karaman (MIT, nowFacultyMember at MIT).
Biomechanics ControlSystems Medical Simulation Surface Haptics