Download
1 / 23
240 likes | 378 Views
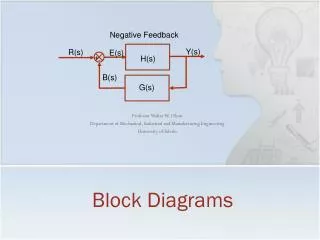
Block Diagrams. x. y. G. A line is a signal A block is a gain A circle is a sum Due to h.f. noise, use proper blocks : num deg ≤ den deg Try to use just horizontal or vertical lines Use additional “ ” to help e.g. y = Gx. +. x. s. Σ. +. -. s = x + z - y. y. z. Σ. +.

E N D
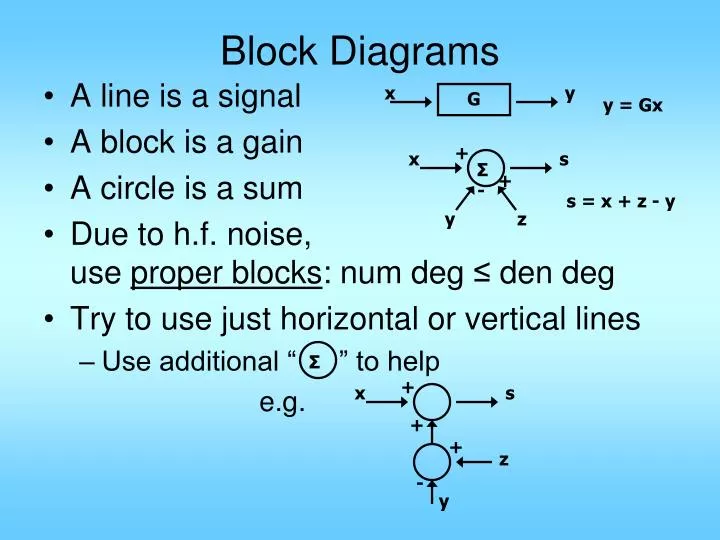
Block Diagrams x y G • A line is a signal • A block is a gain • A circle is a sum • Due to h.f. noise,use proper blocks: num deg ≤ den deg • Try to use just horizontal or vertical lines • Use additional “ ” to help e.g. y = Gx + x s Σ + - s = x + z - y y z Σ + x s + + z - y
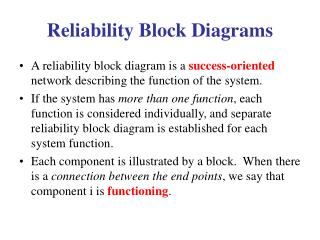
Block Diagram Algebra x y • Series: • Parallel: G1 G2 x y G1 G2 G1 + x y x y G1 + G2 + G2
Feedback: • Proof: + e x x y G1 y - b G2
+ G1 + G2 + -
>> s=tf('s') Transfer function: s >> G1=(s+1)/(s+2) Transfer function: s + 1 ----- s + 2 >> G2=5/(s+5) Transfer function: 5 ----- s + 5 >> G=G1*G2 Transfer function: 5 s + 5 -------------- s^2 + 7 s + 10 >> H=G1+G2 Transfer function: s^2 + 11 s + 15 --------------- s^2 + 7 s + 10 >> HF=feedback(G1, G2) Transfer function: s^2 + 6 s + 5 --------------- s^2 + 12 s + 15
>> delay1=tf(1,1,'inputdelay',0.05) Transfer function: exp(-0.05*s) * 1 >> H2=HF*delay1 Transfer function: s^2 + 6 s + 5 exp(-0.05*s) * --------------- s^2 + 12 s + 15 >> stepresp=H2*1/s Transfer function: s^2 + 6 s + 5 exp(-0.05*s) * ------------------- s^3 + 12 s^2 + 15 s >> step(H2)
Quarter car suspension Series R(s) + y - R(s) + y Feedback - R(s) y
>> b=sym('b'); >> m=sym('m'); >> k=sym('k'); >> s=sym('s'); >> G1=b*s+k G1 = b*s+k >> G2=1/m*1/s*1/s G2 = 1/m/s^2 >> G=G1*G2 G = (b*s+k)/m/s^2 >> Gcl=G/(1+G) Gcl = (b*s+k)/m/s^2/(1+(b*s+k)/m/s^2) >> simplify(Gcl) ans = (b*s+k)/(m*s^2+b*s+k)
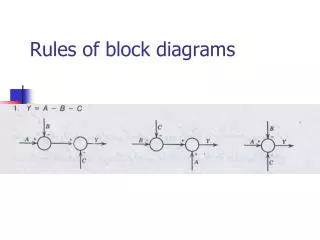
pick-up point summation • Move a block (G1) across a into all touching lines: • If arrow direction changes, invert • If arrow direction remains, no change in block • e.g. along arrow no change along arrow x y x y G1 G2 G1 G2 no change z G3 G1 along arrow along arrow z G3
x G1 G2 x G1 G2 y y z G3 z G3 1/G2 x G1 G3 1/G3 G2 x G1 G2 y y z z G3
I2 I1 - Vc U + y + - I2 - Vc U + y + - - U + y + -
- U + y - U + y U y
Find TF from U to Y: • No pure series/parallel/feedback • Needs to move a block, but which one? Key: move one block to create pure series or parallel or feedback! So move either left or right. + U + + Y + - -
+ U + + Y + - - + U + + Y + - - + U + Y + -
fig_03_16 fig_03_16 is wrong Should be H1(s)G2(s)
fig_03_17 fig_03_17 is wrong
fig_03_19 Can use superposition: First set D=0, find Y due to R Then set R=0, find Y due to D Finally, add the two component to get the overall Y
fig_03_20 First set D=0, find Y due to R
Then set R=0, find Y due to D fig_03_21 G2
Finally, add the two component to get the overall Y fig_03_19