Download
1 / 18
190 likes | 658 Views
Cinematica. Studio puramente descrittivo del moto dei corpi, indipendentemente dalle cause (=> forze) che determinano le variazioni dello stato di moto (=> accelerazioni = variazione di velocità) Cinematica “scalare”: - studia il moto unidimensionale

E N D
Cinematica Studio puramente descrittivo del moto dei corpi, indipendentemente dalle cause (=> forze) che determinano le variazioni dello stato di moto (=> accelerazioni = variazione di velocità) Cinematica “scalare”: - studia il moto unidimensionale - necessita di quantità “scalari”, esprimibili cioè da un’ unica funzione del tempo Cinematica “vettoriale”: - studia il moto in due o più dimensioni - necessita di “quantità vettoriali”
Punto materiale, sistema di riferimento • Punto materiale ( astrazione) : oggetto privo di dimensioni • (concretamente: oggetto le cui dimensioni sono trascurabili • rispetto a quelle delle regioni di spazio in cui si muove o, meglio, • rispetto alle dimensioni tipiche entro cui variano apprezzabilmente • le quantità che ne determinano il moto ) • La descrizione del moto presuppone la definizione di un • “sistema di coordinate”: • - scelta di un punto arbitrario dello spazio detto “origine” • - scelta di un sistema di “assi coordinati” lungo i quali misurare • le distanze e/o rispetto ai quali misurare le posizioni angolari
Moto unidimensionale Origine “traiettoria” 0 x(to) x(t1) x(t3) x(t2) x(t4)….. x Grafico della legge del moto: • (“diagramma orario”) x(t) x4 x2 x3 x1 x0=x(t0) t t0 t1 t2 t3 t4
Coordinata curvilinea e velocità scalare media • “Coordinata curvilinea” s(t) : • spazio percorso al tempo t lungo la “traiettoria” luogo geometrico dei punti dello spazio occupati dal punto materiale durante il moto P(t) s(t) Po Velocità scalare media tra due istanti t1 e t2=t1+Dt s(t) “legge del moto” s(t2) Ds s(t1) Dt t1 t2 t
Velocità scalare istantanea E’ la derivata rispetto al tempo della coordinata curvilenea s(t): (dimensione : [v] = m/s) : s(t) v(t) = tan(a(t)) a (t) t Nota la funzione v(t), la legge del moto s(t) si ottiene per integrazione: ds = v(t) dt
D t v(t) Integrazione della velocità to t1 t2 t v(t) to t1 t2 t3 t4 t5 t v(t) to t t
Accelerazione scalare media : Accelerazione (dimensione : [a] = m/s2) Accelerazione scalare istantanea : Nota la funzione a(t), la velocità v(t) si ottiene per integrazione: dv = a(t) dt
Moto rettilineo uniformemente accelerato accelerazione costante: a(t) = a a(t) a t t0 velocità: v(t) tanb = a b v0 t0 t posizione: s(t) tana(t0) = v0 a s0 t
Moti periodici moti la cui legge oraria è una funzione periodica f (t) del tempo: Þ esiste una costante T tale che : T “periodo” t Teorema di Fourier: una qualsiasi funzione periodica è esprimibile come una serie di termini sinusoidali: “sviluppo in serie di Fourier” di f(t) dove: “frequenza fondamentale” “valor medio” “coefficienti di Fourier”:
Moto armonico Moto con legge oraria: “ampiezza” “fase” “pulsazione” Periodo T: Þ Þ “Frequenza”: Fase: Þ x(t) posizione iniziale A t -A
Posizione: Velocità e accelerazione in un moto armonico A -A 0. A T/2 T t x -A Velocità: spostamento nullo: x=0 velocità massima accelerazione nulla spostamento masimo: x=A velocità nulla: v=0 accelerazione massima (in modulo): a = -w2A w A - w A Accelerazione: w2A Equazione differenziale del moto armonico: - w2A
Nella legge oraria: Condizioni iniziali e costanti di integrazione le costanti di integrazione A e j sono determinate dalle “condizioni iniziali” (posizione e velocità iniziali del moto). Esempi: i) posizione iniziale : velocità iniziale nulla: 0. { Þ Þ la soluzione particolare che corrisponde alle condizioni iniziali specificate è: Þ Þ l’ampiezza dell’oscillazione coincide con lo spostamento iniziale dall’origine varia A t varia j
ii) posizione iniziale nulla: Condizioni iniziali: esempi velocità iniziale : v 0 x 0. Þ Þ Þ Þ t Þ l’oscillazione avviene con ampiezza A = v0 / w
In generale, per una qualsiasi legge oraria x(t) soluzione di un’equazione differenziale in cui compare la accelerazione Soluzione generale dell’equazione del moto , le condizioni iniziali sulla posizione e la velocità determinano le costanti di integrazione moto di un grave uniformemente accelerato dalla gravità : Esempio: Þ Þ soluzione generale: Þ con A,B costanti di integrazione Condizioni iniziali: Þ varia A soluzione particolare: Þ t varia B
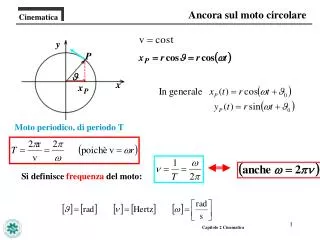
Proiezione su assi ortogonali di un moto circolare uniforme Moto armonico: proiezione sugli assi ortogonali di un moto circolare uniforme la velocità angolare costante del moto circolare costituisce la pulsazione w del moto armonico: J (t) = w t + J0 y P R J(t) x x(t) = Rcos[ J (t)] = = R cos[ w t + J0]
si verifica in presenza di una decelerazione di tipo “viscoso”, ossia proporzionale alla velocità : Moto smorzato esponenzialmente Þ Þ Þ Þ J 5t t t “costante di tempo” dello smorzamento Þ Per t »5 t : tè l’intersezione con l’asse dei tempi della retta tangente alla curva al tempo t = 0 :
Spazio percorso in un moto smorzato esponenzialmente : t v 0 x 0.
Moto accelerato in presenza di un attrito viscoso: termine di attrito viscoso (proporzionale alle velocità) termine costante (es: g) Þ Posto: Þ Þ Þ Þ Þ Þ t “velocità limite” : (indipendente da v0 )