Download

1 / 18
• 180 likes • 307 Views
MUAC i4D+CTA Validation Feedback . DRAFT: 06/06/2012. SESAR Step 1 i4D validations. 2011. 2014. 2010. 2012. 2013. Flight Trial. Coupled simulators. i4D S tep C. Ground systems 3 rd generation Airborne systems 2 nd generation (Step A + B outputs). Simulators. i4D S tep B.

E N D
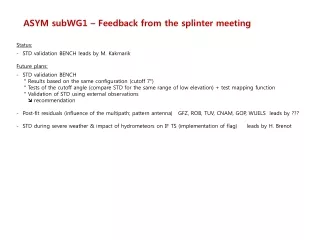
MUAC i4D+CTA Validation Feedback DRAFT: 06/06/2012
SESAR Step 1 i4D validations 2011 2014 2010 2012 2013 Flight Trial Coupled simulators i4D Step C Ground systems 3rd generation Airborne systems 2nd generation (Step A + B outputs) Simulators i4D Step B Ground systems 2nd generation (Step A outputs) Flight Trial Coupled simulators Initial developments air + ground i4D Step A i4D Presentation for SESAR Internal Meeting Page 2
Step A Comments Only Remember • We are running three sets of simulations • the beginning of this year (2012) was step A • the beginning of next year (2013) will be step B • the end of 2013 step C • The plan/report/HMI/and these comments are only applicable to step A and will be developed so that at the end of step C we have something we can go operational with. • Step A was only proof of the technology and a very basic HMI that would never get in to the operations room in its current form.
Concept Suitability for En-route Description • Controllers reported that the complexity of airspace, route structure not conducive to RTA operations. • Controllers consider the RTA to be a strategic not a tactical tool. • Controllers felt that RTAs appear to benefit the TMA and negatively impact the en-route. Impact • Workload increase to merge with over-flights, in / out-bounds due to speed differential. • It is anticipated that the workload increase would result in a decrease in capacity. • At network level will probably assist the TMA. Concept might be beneficial in the overall MUAC+TMA area. • Controllers reported a reduction in their ability to maintain efficient, safe, expeditious and economic flows. Recommendations • Consider moving the task of RTA handling to a meta-planner/FMP role. • Consider using segregated arrival routes. • Clarify when the TMA actually needs RTA operations to be in place – sharing network effect.
Extended Trajectory Information Description • Extended projected profile information available to controllers • Graphical trajectory preferred to tabular depiction Impact • Situational awareness increased (e.g. discrepancy indicator) • 2D path check to ensure synchronization considered beneficial. • Additional information such as ToC/ToD expected to be useful for planning usage of radio. Recommendation • Investigate additional data within ADS-C of interest to display to the controller. • Investigate the use of EPP data incorporation in controller tools such as MTCD and vertical aid windows.
Ground/Air Communication Description • After uplinking the new route FMS takes 2-3 minutes to recalculate and transmit the EPP. Impact • During this time the FMS is not available for ATCO interaction. • Partly due to this delay the resulting aircraft speed change to achieve the RTA can be larger than the controller anticipates. Recommendation • Airbus to investigate performance improvements for Step B.
Mixed Equipage Operations Description • Controllers consider that handling traffic with a mix of speed and time control increases complexity. • Controllers were uncertain how to integrate mixed equipage without giving priority to RTA flights. • The controllers reported no significant difference in their ability to manage 25% i4D aircraft compared to 40% i4D aircraft. Impact • A mixture of flights on an RTA and non-RTA makes it very difficult to mentally calculate separation. • The mixture of controlling traffic via direct (speed) and via indirect (time) instructions increases workload and reduces situational awareness. • Uncertainty on integrating RTA flights led the controllers to give priority to RTA flights and negatively restricting non-RTA aircraft. Recommendations • Consider HMI improvements to aid mixed mode operations. • Consider HMI changes to improve the predictability of RTA aircraft. • Clarify procedures for integrating RTA flights.
Predictability of Aircraft onRTA Description • Controllers report that they could not predict the magnitude of the initial speed change before it took place. • Once the RTA is given, it's hard to judge how the a/c’s speed will alter from the point where the RTA is given to the actual point of the RTA. Impact • Controllers were unable to plan the development of the traffic for aircraft flying to RTAs. • While flying to an RTA controllers were reluctant to separate against an i4D aircraft as they were unable to anticipate the variation of the speeds. Recommendations • Investigate the development of an air or ground “What-If” to advise controllers of the expected speed changes.
RTA Adherence Description • ATCOs feel that concept rather than help them to control it adds constraints on their freedom of control techniques. • Controllers were reluctant to interact with aircraft once an RTA had been issued. • Observers reported a negative impact of severe weather on RTA adherence. Impact • Reluctance to vector RTA flights resulted in non-RTA flights being penalised. • Not "touching“ the RTA flights complicated tasks, less controller freedom in sequencing traffic and solving conflicts. Recommendations • Investigate the impact of changing the i4D flight profile and the ability to maintain the RTA. • Investigate the effect of changing the philosophy of “first come first served”. • The Project Team feel that an indication of abeam times would be useful when the aircraft are constrained on headings.
Vertical Profiles Description • Flying to time means that controllers are not able to maintain separation using speed instructions so they increased the use of vertical separation to compensate. • This was exacerbated by RTAs being issued on a point outside the controller AOR. Impact • As separation must be guaranteed when the aircraft leaves the AOR the coordination workload increased due coordination of vertical separation. • Vertical separation instructions are deviations from the optimal descent profile and therefore less efficient. • Use of vertical separation ("Stepped descents") increased both the workload of the EC and the use of the frequency. Recommendations • Place RTAs on a point within the AOR in addition to the external point. Note: while this may alleviate the issue it could increase workload and reduce efficiency. • ASAS sequencing could be used to maintain longitudinal separation and therefore remove the need for vertical separation.
Controller HMI Description • The HMI used for step A was designed as a prototype for development in Steps B and C. • It is cumbersome and takes a lot of time and attention, thus interfering with the i4D concept evaluation. Impact • Controller workload increased. • ATCO team working and situational awareness were reduced. Recommendation • Rework the following elements of the HMI for Step B: • scattering of information, menus, RTA indication, speed indication, discrepancy indicator, CPDLC dialogue, EPP automation, what-if tool.
Roles & Responsibilities Description • Procedures for the Step A simulations were simplified to minimise the training and differences from current operations. • Roles and responsibilities were left open to allow the controllers to develop naturally the most efficient way of working. • Controllers reported that the delegation of RTA clearances to the coordinating controller to compose exit planning requirements seemed a logical step. Impact • The uncertainty on the procedures caused some confusion within the controller team and between the pilots and controllers, e.g. when to retain/cancel an RTA. • Responsibilities had to be trialed over the course of the simulations and were matured with experience. Recommendations • Clarify procedures for controllers and pilots. • From the lessons learnt during Step A further develop the operational procedures and responsibilities.
IOP-A at Maastricht UAC Planning for i4D Step B: • Step A realised the minimal set of functionality to start validating the i4D concept with a focus on the technology and basic operational functionality. • The objectives mentioned here are applicable for the overall i4D Step B validations. • In the current approach the same MUAC i4D IBP supports validation to be executed: • RTS: non-coupled, stand-alone at MUAC) • At this moment the exact spread of objectives over the 3 validation options has not been determined. • The technical objective for Step B is to solve the identified bugs in the ATC system and resolve blocking air-ground interface issues as detected during Step A.
IOP-A at Maastricht UAC Planning for i4D Step B: • The following functional evolution is planned for Step B: • a wider set of CPDLC messages for 4D route uplinks; • refinement of HMI, where possible a more enhanced integration into the label, moving away from the explorative HMI as used during Step A; • refinement or fine tuning of parameters of the ADS-C contracts based on experience gained during Step A; • implementing a higher degree of automation in the 4D trajectory negotiations between air and ground; • initial prototype development of a What-if function; • emulation of an external Arrival Manager (AMAN). • Traffic samples enhancements: • managing flows of aircraft flying to RTAs; • free route from entry to exit MUAC of airspace; • introduction of more realistic wind variations.
IOP-A at Maastricht UAC Planning for i4D Step C: • Step C will concentrate on the development of tools assisting the controllers in the application of the i4D concept. • Step C will also cover an upgraded airborne implementation, which was not the case for Step B. • The objectives mentioned here are applicable for the overall i4D Step C validations. In the current approach the same MUAC i4D IBP supports validation to be executed: • RTS: non-coupled, stand-alone at MUAC as well as coupled to the Airbus cockpit simulator (i.e. VP463); • live trial (i.e. VP472). At this moment the exact spread of objectives over the 3 validation options has not been determined. • The technical objective for Step C is to solve the identified bugs in the ATC system and implement in the ground based ATC systems and the airborne systems the latest and updated EUROCAE WG78/ RTCA SC214 released enhanced data link standard, where necessary resolving air-ground interface issues as detected.
IOP-A at Maastricht UAC Planning for i4D Step C: • The following functional evolution is planned for Step C: • a further refinement of HMI; • increased automation in the 4D trajectory negotiations between air and ground; • enhanced prototypes of a What-if function; • the use of the downlinked EPP in additional tools, e.g. workload and conflict detection/display • Traffic samples enhancements: • traffic levels at the 2020 time frame; • up to 70% equipped aircraft. • RTS + Flight Trial(s) • 01/09/2013 – 29/11/2013
Comments to WG78 / SC214 • Number of characters in e.g. arrival routes: ground (AIP) = GESKA1N, air (702A) = GESK1N. • UM267 (80R) CLEARED [routeClearance enhanced] and UM268 (83R) AT [position] CLEARED [routeClearance enhanced]. Why does UM267 (80R) remove the MET data? • Same for UM80/UM83? • No flight level constraints allowed in the routeClearance enhanced for planned level changes en-route (step climb/descent). • Addition of a CPDLC message for entry in i4d area (roger type, UM169) • Indication of invalid data in ADS-C report. • PPOS and FROM in EPP report – not required by MUAC. • Emergency status, periodic – or better as an event? • UM338 Maintain Time Constraint – still required as a message