Download
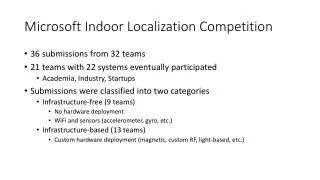
1 / 20
210 likes | 361 Views
Indoor Localization Using Camera Phones. SAI CHAITANYA CS 495/595. Topics. Introduction Approach , Issues and Solutions Experiments conducted and preliminary results Related work and Research Conclusion and future Work. Introduction.

E N D
Indoor Localization Using Camera Phones SAI CHAITANYA CS 495/595
Topics • Introduction • Approach , Issues and Solutions • Experiments conducted and preliminary results • Related work and Research • Conclusion and future Work
Introduction Network of devices used to wirelessly locate objects or people Relies on nearby anchors (nodes with a known position) Early Systems vs. Camera Mobile phones
Camera Mobile Phones • Determining user’s location indoors based on what the camera-phone ‘’sees” • Image Capturing and sending • Image matching with the database of images • Image matching algorithms
Approach, Issues and Solutions Location Determination Database Creation Energy Optimization
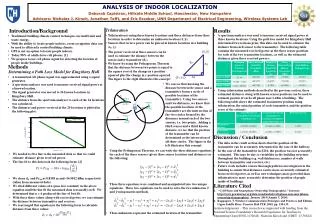
Location Determination • Assigning a weight which reflects the degree of similarity between the two images. • Three off-the-shelf algorithms for image comparison: • Color Histograms • Wavelet Decomposition • Shape Matching
Approaches • Weight of the images in the database with respect to the query image are known, following methods can be used for location determination: • Naïve Approach • Hierarchical Approach • History-based Approach
Naive Approach: The images in the database are organized in a flat manner. The location of the user is the one that maximizes the probability of seeing the query image. Hierarchical Approach: The images corresponding to a floor are grouped together The images corresponding to a room are grouped together and so on. The probability of error decreases, because the system has fewer image to confuse the query image with.
History-based Approach • Web server keeps track of the trajectory of the user • The location of the user is determined from a multiple query images received over a certain period of time • When the server receives a query image, it looks at the last n-1 query images
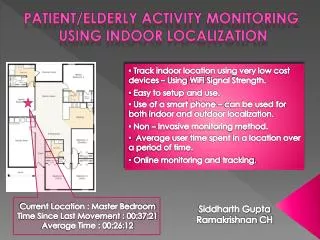
Database Creation • Multiple images of a cornertobetaken • Tagging images ----The process of tagging images with location can be partially automated , by using a speech recognition interface on the phone, so that the database creator can tag images by announcing her location while pictures are taken
Energy Optimization • Primarily determined by two factors: ---frequency of sending query images ---size of the image • Server-initiated location query approach ---when the server responds with location, it piggybacks the time period after which the phone should send the next query image
Snapshots Contd. Left : image in the database; Center: image with a person (success rate= 90%); Right : image with a person wearing a brown jacket (success rate=70%)
Experiments and Preliminary Results • How successful is our approach in achieving room-level accuracy? • How successful is our approach in estimating the orientation and location of the user anywhere in the building? • Three experiments were conducted ---To find the probability of success for room-level accuracy.
---To find the probability of success for quarter room-level accuracy ---To find the probability of success for corner-level accuracy. Conclusions from the experiments : Room-level accuracy--Naïve Approach Quarter-room level accuracy—Hierarchical Approach Corner-level accuracy---History based Approach
Table 1. Probability of success for the three experiments
Low-resolution pictures of a few rooms taken from the door Low-resolution query image matches with Image 3
Low-resolution pictures of different corners Query image matches with Image 4
Related Work • Work is being done in using camera phones as interaction devices by tagging physical objects with visual codes and using vision techniques to extract and interpret the information stored in these visual codes • Artificial intelligence(AI) community • Use of landmarks for positioning • Taking an action • Theoretical nature
Conclusion and future work • How well can this approach scale across buildings, especially for ones with high symmetry? • completely resilient to changes in the environment? • Will it be necessary/feasible to combine this approach with other low-cost location sensing mechanisms to improve accuracy and scalability? • Using a body-worn accelerometer in addition to a camera phone may improve location accuracy