Download
1 / 36
380 likes | 721 Views
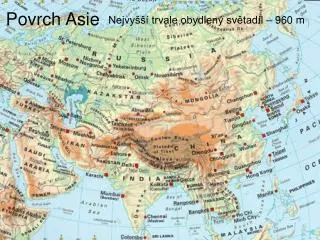
Akčné členy neelektrických veličín pre (hlavne) spojité regulačné obvody. PRS. Akčné členy neelektrických veličín. 1. 25.9.2014. RS- riadená sústava. y- riadená sústava. MČ- merací člen. y- odozva meracieho člena. *. S- snímač. w- žiadaná (riadiaca) veličina. MP- merací prevodník.

E N D
Akčné členy neelektrických veličínpre (hlavne) spojité regulačné obvody PRS Akčné členy neelektrických veličín 1 25.9.2014
RS- riadená sústava y- riadená sústava MČ- merací člen y- odozva meracieho člena * S- snímač w- žiadaná (riadiaca) veličina MP- merací prevodník e- regulačná výchylka R- regulátor m- opravná veličina P- pohon u- akčná veličina RO- regulačný orgán U- zdroj energie AČ- akčný člen Poruchy 1 - poruchy v riadenej sústave Poruchy 2 - poruchy meracom člene (nepresnosť) Tekutinovéenergetické obvody v regulačných obvodoch Jednoduchý jednoparametrový regulačný obvod Úloha:regulačného obvodu,meracieho člena, regulátora,akčného člena? PCS, DCS, hybridné RS PRS Akčné členy neelektrických veličín 2 25.9.2014
ČO SÚ TEKUTINY? Plyn Kvapalina • Látky nepevného skupenstva – zaujímajú tvar nádoby • Tekutiny = Kvapaliny & Plyny & Pary
*5 *4 Kotol *1 *3 *2 TLAKOVÉ STRATY v tekutinových obvodoch Straty tlaku v potrubí môžu vznikať ako: Tlakové úbytky na premenných odporoch :*1 • Ventily, filtre • Tlakové úbytky na pevných odporoch : *2 • Clony, obmedzovacie odporyatď. • Straty trením : *3 • Drsnosť potrubia, kolená, T-kusy • Hydrostatické straty: *4 • Vertikálne potrubia –prúdenie smerom nahor • Straty vplyvom teploty : *5 • Ochladzovanie potrubia
STAVY TEKUTINY – VODNÁ PARA 120°C 100°C 100°C 90°C Voda Mokrá sýta para Suchá sýta para Prehriata para
Tekutinové obvody všeobecne Zdroje, potrubia a prvky, armatúry, spotrebiče Riadenie prietoku a tlaku tekutín (kvapalín, plynov a pár) v technických zariadeniach -RO Straty prietokom tekutiny v potrubí - trenie, „dvíhaním, klesaním“ tekutiny (psi) Armatúry (RO):ventil, klapka, posúvač, kohút (psi ) Akčný člen v tekutinovom energetickom obvode tlakové pomery v tekutinovom potrubí všeobecne tlakové pomery priamehovodorovného potrubia PRS Akčné členy neelektrických veličín 6 25.9.2014
Regulačný orgán - armatúra - upravuje neelektrickúakčnú veličinu ventil klapka Upchávka s „O“ krúžkom nízke trecie sily, tesniaca schopnosť – pretlak, podtlak, prevádzková teplota 2 až 130 °C, bezúdržbová - viac ako 500 000 cyklov PRS Akčné členy neelektrických veličín 7 25.9.2014
Konštrukčné usporiadanie AČ s pneumatickým pohonom Servosystém, „v pneu s korektorom“ PRS Akčné členy neelektrických veličín 8 25.9.2014
Servoventil, pneu RO s korektorom (Rt – priemyselný (technologický) regulátor, M – motor, MZ – mechanická záťaž) PRS STN ISO 3511 – 1 až 4 9 25.9.2014
Servoventil, pneu RO s korektorom (Rt – priemyselný (technologický) regulátor, M – motor, MZ – mechanická záťaž) PRS STN ISO 3511 – 1 až 4 10 25.9.2014
Konštrukčné usporiadanie AČ s elektrickým a pneu- pohonom Elektrické pohony/pneu, hydro: špecifický výkon,prevodovka, servosystém, ochrany, Ex PRS Akčné členy neelektrických veličín 11 25.9.2014
Pohony v AČ elektrické pneumatické Pohony: špecifický výkon,prevodovka, servosystém, ochrany, Ex hydraulické a pneumatické priamy/rotačný jednočinný dvojčinný PRS Akčné členy neelektrických veličín 12 25.9.2014
Druhy RO základné pojmy Poloha uzáveru RO:(kuželka – sedlo) je určená veličinou m, tj. výstupom z technologického regulátora, ventil: z-zdvih RO, klapka: uhol pootočenia χ Čas uzáveru: čas, za ktorý sa uzáver (napr. kuželka) presunie z jednej krajnej polohy do druhej Regulačný rozsah RO:interval, v rámci ktorého môže byť nastavená hodnota riadenej veličiny (napr. teplota) akčnou veličinou u zmenou polohy uzáveru RO. Tvary prietokových kanálov v telese RO sa volia tak, aby vlastné teleso zabezpečovalo minimálne tlakové straty vznikajúce trením, vírením, zúžením prúdu alebo zmenou smeru prúdiacej tekutiny, čiže aby tlakový spád (strata) vznikala hlavne na samotnom uzavieracom (škrtiacom) systéme RO. Potom vlastnosti RO vhodne popisujú ich konštrukčné a prietokové charakteristiky PRS Akčné členy neelektrických veličín 13 25.9.2014
Konštrukčné charakteristiky RO Konštrukčná charakteristika RO(KCH RO),tj. charakteristika otvorenia RO, predstavuje závislosť voľnej prietokovej plochy v uzavieracom systéme S od polohy uzáveru z, tj. zdvihu (uhlu pootočeniaχ) Pomerná prietoková plocha Pomerná poloha uzáveru Pomerná konštrukčná charakteristika • Rýchlo/otváracia /zatváracia • lineárna • rovnopercentná PRS Akčné členy neelektrických veličín 14 25.9.2014
Konštrukčné charakteristiky RO Rýchlootváraciu KCH ROreprezentuje ŠS, ktorý už pri malom zdvihu, obyčajne 0,25ξ dosiahne maximálnu hodnotu prietokovej plochy φ. Armatúra s touto KCH – sa používa na uzatváracie (otváracie) funkcie – nie regulačné!!! Lineárnu KCH ROreprezentuje ventil, pre ktorý platí, že rovnakej percentuálnej zmene polohy uzáveru (kuželky) zodpovedá rovnaká percentuálna zmena voľnej prietokovej plochy. Cez polohu uzáveru sa dá presne nastaviť požadované prietokové množstvo (pri konštantnom spáde na RO). Rovnopercentná (ekvipercentná) KCH ROje definovaná ako charakteristika uzavieracieho systému, v ktorom priurčitej percentuálnej zmene polohy uzáveru sa prietoková plocha zmení o odpovedajúci rovnaký percentuálny diel z okamžitého voľného prietokového prierezu Podmienka rovnopercentnosti KCH RO Potom pri zmene zdvihu o dzsa zväčší volná prietoková plocha vždy o rovnaký percentuálny diel a voľná prietoková plocha pomerná char. PRS Akčné členy neelektrických veličín 15 25.9.2014
Typy zavieracích (škrtiacich) systémov Tanierová kuželka Rýchlootváracia KCH RO Rotačný paraboloid Lineárna KCH RO Tvarovaná kuželka ľubovolná Výpočet KCH RO: Okamžitá a maximálna prietoková plocha Rotačný elipsoid rovnopercentná KCH RO KCH RO PRS Akčné členy neelektrických veličín 16 25.9.2014
Typy zavieracích (škrtiacich) systémov Regulačná klapka pre obdĺžnikové potrubie a jej KCH PRS Akčné členy neelektrických veličín 17 25.9.2014
Prietokové charakteristiky RO Prietoková rovnica charakterizujúca prietok reálnej tekutiny cez zoškrtený prietokový prierez: Q[m3.s-1] je objemový prietok v potrubí, • [–] prietokový koeficient vztiahnutýna zoškrtený prierez, • [–] koeficient expanzie charakterizujúci pružnú tekutinu, tj. plyn alebo paru (pre plyny 1, pre kvapaliny 1), S [m2] prietoková plocha zúženého prierezu, kuželka- sedlo ρ [kg.m-3] hustota pretekajúcej tekutiny pri prevádzkových podmienkach, p [Pa] tlakový spád na uzavieracom zariadení, k1 = . Pomerné prietokové množstvo Ak k1 = k1,max = konšt. a pmax = p = = konšt. lebo a tiež Čiže PCH RO odpovedá KCH RO !!!!! PRS Akčné členy neelektrických veličín 18 25.9.2014
V skutočnosti tlakový spád na RO nebude konštantný (v rámci činnosti), pomery na RO podstatne ovplyvňujú stavové veličiny prúdiacej tekutiny (, ε, T, p, atď.), tlakové straty v potrubiach (funkcieQ), straty v prídavných armatúrach (funkcieQ), a tiež premenlivá charakteristika zdroja, napr. čerpadla. Vplyv týchto parametrov nemožno pri analýze reálneho tekutinového obvodu zanedbať, a tak predpoklad, že PCH RO odpovedá KCH RO, platí len za určitého zjednodušeného nazerania, čiže v reálnom svete neplatí. Celkový tlakový spád ∆p pričom Súčinnosť čerpadla, RO a potrubia Pri návrhu RO, snaha o blízkosť PCH RO a KCH RO !!! Tekutinové obvody sú v zásade nelineárne, čo sťažuje ich analytické riešenie PRS Akčné členy neelektrických veličín 19 25.9.2014
V pracovnom rozsahu sa menia tlakové pomery na RO podľa parametrov prvkov v tekutinovom obvode, vytvoriť tzv. pracovnú (reálnu) charakteristiku / súbor charakteristík RO, postihujúce uvedené deje, je veľmi náročná úloha. Preto sav praxi najčastejšie postupuje pri návrhu RO podľa metódy využívajúcej koeficient Kv(určenie rozmerov RO a reálnej PCH RO). Zásady vhodné pri voľbe PCH RO Voľba RO s vhodným typom PCH - musí odpovedať statickým a dynamickým vlastnostiam riadenej sústavy, RO - člen regulačného obvodu (RObv.), má vplyv na vlastnosti obvodu (statické a dynamické), a tak aj nakvalitu regulačného pochodu. Korektný spôsob návrhu PCH RO - len analýza RObv., tj. určenie potrebných, napr. reálnych prechodových charakteristík VT (výrobná technológia) a AP (identifikácia, prenosy), v praxi často nevykonateľné (veľká prácnosť, nevhodné zásahy do výrobného procesu, atď). Skúsenosti z praxe: • PCH RO nie je podstatná pre kvalitu regulačného pochodu, ak: • pre zmenu zaťaženia RO (výstupný prietok QV) platí, že je menšia ako 2/1, napr. QVmax/QVmin < 2/1. • perióda kmitov regulačného pochodu je krátka, • citlivosť (zosilnenie) regulátora je vysoká a čas nábehu riadenej sústavy je dlhý (v minúty a viac), PRS Akčné členy neelektrických veličín 20 25.9.2014
P o r u c h y 1 R O u y U R S < M Č S P P o r u c h y 2 A Č M P y * m e w R m a t e m a t i c k ý č l e n y - r i a d e n á v e l i č i n a R S - r i a d e n á s ú s t a v a M Č y * - o d o z v a m e r a c i e h o č l e n a - m e r a c í č l e n - ž i a d a n á ( r i a d i a c a ) v e l i č i n a S w - s n í m a č - r e g u l a č n á o d c h ý l k a e M P í k - m e r a c í p r e v o d n R m - o p r a v n á v e l i č i n a - r e g u l á t o r u P - a k č n á v e l i č i n a - p o h o n R O U - z d r o j e n e r g i e - r e g u l a č n ý o r g á n A - p o r u c h y v r i a d e n e j s ú s t a v e Č P o r u c h y 1 - a k č n ý č l e n - p o r u c h y v m e r a c o m č l e n e ( n e p r e s n o s ť ) P o r u c h y 2 Skúsenosti z praxe (pokračovanie): • RO s lineárnou PCH je vhodný pre tieto prevádzkové podmienky, ak: • zmeny zaťaženia v prevádzke vyžadujú lineárnu PCH RO, čiže ostatné prvky v regulačnom obvode majú aproximatívne lineárne prevodové charakteristiky, • požadované zaťaženie je QVmax/QVmin > 8/1, • tekutina pretekajúca RO nesie tuhé substancie. • Ostatné prípady vyžadujú rovnopercentnú PCH RO (častý prípad), lebo jej tvar býva blízky ku inverznej charakteristike časti regulačného obvodu (ak v technológii prevažujú potrubia). PRS Akčné členy neelektrických veličín 21 25.9.2014
Prípadová štúdia, príklad RObv.,návrh RO cez Kv Príklad RObv., Technológ.: zmiešavacie potrubie na vytváranie definovaného množstva zmesi dvoch tekutín QV. Regulovanou veličinou yje hustota zmesi prietoku QV pri konštantných hustotách oboch zložiek prietokov Q1, Q2. Akčná veličina m reprezentuje polohu uzáveru RO, ktorý riadi prietokQ1 priamo a Q2 nepriamo (v rámci zmiešavacieho systému). Požiadavky na riadenie tekutinového obvodu: V rámci regulácie sa zásadne mení len žiadaná hodnota regulovanej veličiny w, málo sa mení zaťaženie regulovanej sústavy QV, tj. spotreba v následnej technológii QV≈ konšt. PRS Akčné členy neelektrických veličín 22 25.9.2014
Variant - charakteristika technológie je v celom rozsahu Q1lineárna V tomto prípade sa PCH RO volí napr. podľa statickej charakteristiky regulovaného objektu. V časti a) je naznačená statická charakteristika technológie a v časti b) požadovaná statická PCH RO. V častiach c)ad) sú znázornené závislosti ZRS = (∆y/∆Q1), a zosilnenia ZRO ako funkcia Q1 a m. Statická charakteristika technológie je v celom rozsahu Q1lineárna. Potom aj PCH RO, ktorá určuje závislosť Q1 = f (y) mala by byť lineárna s konštantným zosilnením v celom rozsahu premenného Q1. PRS Akčné členy neelektrických veličín 23 25.9.2014
Variant - statická charakteristika RObv. je nelineárna V prípade, že statická charakteristika regulovaného objektu je nelineárna, mala by byť aj statická charakteristika RO, tj. PCH RO nelineárna a najvhodnejšie tak, aby bola inverzná ku charakteristike regulovaného objektu. Potom výsledná charakteristika regulovaného objektu bude blízka lineárnej PRS Akčné členy neelektrických veličín 24 25.9.2014
Návrh svetlosti RO – Kv koeficient • Projektant RS – návrh typu a veľkosti (svetlosť) RO, tj. DN, D • Dimenzovanie podľa svetlosti potrubia: nesprávna!!!! predimenzovaný RO (veľká svetlosť voči správnej) – char. b poddimenzovaný RO(malá svetlosť)väčšinou úplne otvorený – char. c, d Správny - a Na správne určenie svetlosti RO sú dôležité tieto parametre tekutinového obvodu: • maximálny a minimálny tlakový spád na RO – reálny tekutinový obvod, len RO • požadované maximálne a minimálne prietokové množstvo pri daných/zvolených polohách uzáveru RO, celá technológia • pre plyny a pary absolútny tlak pred RO, nadkritické pomery prietoku, Poznámka 1 • ostatné (stavové) parametre a fyzikálne vlastnosti prúdiacej tekutinyPoznámka 2 (kavitácia) PRS Akčné členy neelektrických veličín 25 25.9.2014
Poznámka 1 Poznámka 2 PRS Akčné členy neelektrických veličín 26 25.9.2014
V súčasnosti sa dimenzovanie svetlosti RO rieši najčastejšie metódou určenia koeficientu Kv.Číselná hodnota koeficientu Kv predstavuje objemový prietok vody ( = 1000 kg.m-3) v metroch kubických za hodinu, ktorá pretečie plne otvoreným zavieracím systémom RO pri tlakovom spáde na regulačnom orgáne ∆p = 100 kPa, tj. je to PCH RO pri definovaných podmienkach. Koeficient máva označenie aj podľa polohy uzáveru, napr. Kv100, čiže pri otvorení systému na 100 % (Kv10 pri otvorení systému na 10 %). Výrobcovia RO uvádzajú v katalógoch pri RO len koeficient Kv v závislosti na zdvihu (uhlu pootočenia), čo predstavuje vlastne PCH RO pre vyššie uvedené parametre vody. Výpočet prietoku tekutiny cez RO kde k= ..S.√2. - prevodová konštanta pre QVv m3hod.-1, pozri firemný katalóg ak k = Kv (v – valve, ventil) V USA a Veľkej Británii sa používa Cv , pričom platí Kv = 0.865Cv (rôzna sústava jednotiek) PRS Akčné členy neelektrických veličín 27 25.9.2014
Tabuľka na výpočet prietoku cez RO s koeficientom Kv ; ; PRS Akčné členy neelektrických veličín 28 25.9.2014
Návrh svetlosti RO – Kv koeficient Skutočný prietok cez RO nie je len funkciou zdvihu uzáveru, ale aj funkciou viskozity, hustoty prúdiacej tekutiny, tlaku pred RO a tlakového spádu na RO. Prednosťou metódy koeficientuKv je, že umožňuje určiť maximálne prietoky rôznych látok cez RO pri daných tlakových spádoch podľa reálnejprietokovej rovnice – rovnice v tabuľke (napr. Qmax,100 - Kv100 , Qmax,50 - Kv50 , atď.). Výpočet koeficientu Kv, tj. Kv100 pre RO sa uskutoční po výbere KCH RO pre požadovanú PCH RO podľa vzťahov v tabuľke. Na základe znalosti KCH RO (katalóg) a vypočítaného (požadovaného) Kv100 sa z katalógu vyberie RO s najbližším vyšším Kv, čím je určená aj jeho svetlosť (DN), tj. určený RO (rozmery, hmotnosť, atď.).Kontrola PCH RO -kontrola krajných bodov Qmax, Qmin, tj., či je ešte v ich okolí možnosť riadiť prietok zmenou zdvihu. Vykonanie kontroly sa doporučuje pre aspoň tri body, tj. pre minimálne, nominálne a maximálne uvažované prietokové množstvo. Postup pri návrhu RO pomocou Kv koeficienta,tj, typ, svetlosť(DN, D), pohon • Tekutinový obvod a jeho prvky– popis, tekutina a jej parametre .,, p1, p2, - priebehy, max. a min. ∆p na RO, max. a min. Q pri dôležitých bodoch zdvihu (max., nominál, min.), kritické prúdenie, kavitácia) ← z technológie, odhady • Výber KCH RO podľa technologických podmienok jeho činnosti (RZ/O, Lin, Rov%), výber v katalógu: typ ventilu (RO) • Výpočet Kv100prostredníctvom reálnej rovnice z tab., tj. KCH RO ≈ PCH RO, • Zabezpečenie riadenia prietoku pri(Qmax., Qmin.) - Kvs100 = (1,2 až 1,3) Kv100, Qmin. = (0,1 až 0,15) Qmax.,výber v danom type RO najbližší vyšší . Kvs100, • Kontrola PCH RO (Qmax., Qnomin., Qmin.) pre príslušné Kv, PRS Akčné členy neelektrických veličín 29 25.9.2014
Návrh svetlosti RO – Kv koeficient V súčasnosti firmy zaoberajúce sa aplikáciou AČ v regulačných obvodoch ponúkajú firemné výpočtové programy, najčastejšie pre kompletný návrh ROod výpočtu koeficientu Kv až po určenie typu armatúry vrátane pohonu. Podrobné a ucelené informácie o návrhu AČ pre regulačné obvody rôznych, aj náročných riadených veličín, sú uvedené v [1]. PRS Akčné členy neelektrických veličín 30 25.9.2014
Inteligentné akčné členy - pohony Inteligentné pohony- v príslušnom riadiacom meniči sú integrované funkcie PLC a technologické funkcie, ako napr. viacosové polohovaniealebočíslicové riadenie CNC, softwarové kinematické šablóny a pod. Pohonné jednotky v automatizácii - elektrické servopohony: požiadavky na dynamiku, stabilitu otáčok a na široké rozsahy riadenia bez rezonančných zón vyžadujú reguláciu so snímačom otáčok v spätnej väzbe. Náhrada softwarovými monitormi otáčok. Regulacia zložitých mechanických systémov: metódy „soft-computingu“, tj. fuzzy logika, umelé neurónové siete a genetické algoritmy AT&P Inteligentné systémy v procesnej automatizácii 31 25.9.2014
Literatúra: • Emerson Process Management - Fisher: Control Valve Handbook. Marshalltown, Iowa 50158 USA. 2001. • Horváth, K.: Členy systémov automatického riadenia. SVŠT Bratislava, 1967 • Katalógy firiem LDM (CZ), Fisher-Emerson, Landis&Staefa, • Šturcel, J.: Snímače a prevodníky. STU Bratislava, 2002, ISBN 80-227-1712-6. • Šturcel, J.: Prvky riadiacich systémov, časť Meranie neelektrických veličín. STU Bratislava, 2004, ISBN 80-227-2120-4, podporné CD PRS Akčné členy neelektrických veličín 32 25.9.2014
Výrobcovia: Sauter, Iwka, Siemens, Honeywell, Emerson Adresy dodávateľov: • http://www.servosystem.sk/produkty.htm • http://www.turo.sk/katalog/WEBY/apo_elmos/S-ARMAT.HTM • http://www.turo.sk/katalog/ • http://www.ldm.sk/katalog.html • http://www.martsk.sk/obchod/ • http://www.polnacorp.cz/ PRS Akčné členy neelektrických veličín 33 25.9.2014
Regulačný orgán - armatúra - upravuje neelektrickú akčnú veličinu u ventil klapka PRS Akčné členy neelektrických veličín 34 25.9.2014
PRS Akčné členy neelektrických veličín 35 25.9.2014
PRS Akčné členy neelektrických veličín 36 25.9.2014