Download
1 / 1
10 likes | 117 Views
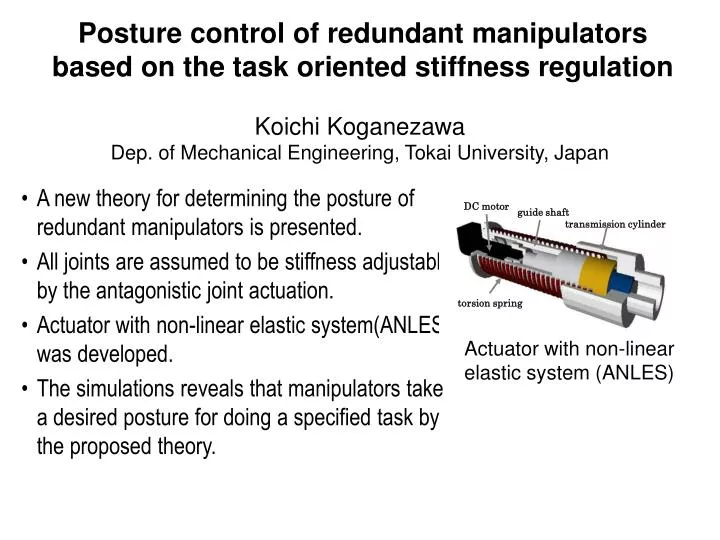
DC motor. guide shaft. transmission cylinder. torsion spring. Posture control of redundant manipulators based on the task oriented stiffness regulation. Koichi Koganezawa Dep. of Mechanical Engineering, Tokai University, Japan.

E N D
DC motor guide shaft transmission cylinder torsion spring Posture control of redundant manipulators based on the task oriented stiffness regulation Koichi KoganezawaDep. of Mechanical Engineering, Tokai University, Japan • A new theory for determining the posture of redundant manipulators is presented. • All joints are assumed to be stiffness adjustable by the antagonistic joint actuation. • Actuator with non-linear elastic system(ANLES) was developed. • The simulations reveals that manipulators take a desired posture for doing a specified task by the proposed theory. Actuator with non-linear elastic system (ANLES)