Download
1 / 25
250 likes | 346 Views
Song Chen and Takeshi Yoshimura Graduate School of IPS, Waseda University March, 2007. A Stable Fixed-outline Floorplanning Method. Outline. Problem Previous Work Fixed-outline Floorplanning Overview Objective Function Solution Perturbation Experimental Results Conclusions. H 0. W 0.

E N D
Song Chen and Takeshi Yoshimura Graduate School of IPS, Waseda University March, 2007 A Stable Fixed-outline Floorplanning Method
Outline • Problem • Previous Work • Fixed-outline Floorplanning • Overview • Objective Function • Solution Perturbation • Experimental Results • Conclusions
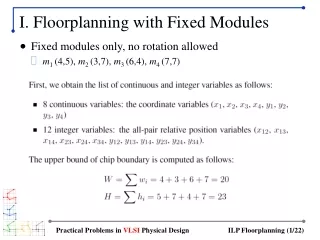
H0 W0 Problem • Given • A set of rectangular blocks among which connections (nets) exist • Specified width wi and height hi for each block bi • Specified rectangular region: W0, H0. (Fixed-outline) • The fixed-outline floorplanning is to determine coordinates for each block such that • There is no overlapping between any two blocks. • All the blocks are placed inside the specified region (fixed-outline) • Some objectives, such as wire-length, etc., are optimal.
Outline • Problem • Previous Work • Fixed-outline Floorplanning • Overview • Objective Function • Solution Perturbation • Experimental Results • Conclusions
Previous Work • S. Adya and I. Markov, ICCD’01 TCAD’03 (Parquet) • New objective functions; New types of move. • C. Lin, et al., ASPDAC’04 • Evolutionary search-based robust fixed-outline floorplanning; Fixed-outline constraint only. • R. Liu et al., ISCAS’05. • Instance augmentation; Fixed-outline constraint only. • T.C. Chen and Y.W. Chang, ISPD’05. • Adaptive Fast-SA; Weights in the cost function changed Dynamically.
Previous Work (Cont’) • The existing fixed-floorplanning methods work well when fixed-outline constraint is the only objective. • Poor success rates when optimizing wire and other objectives. • And when the aspect ratios are far away from one (W=H).
Outline • Problem • Previous Work • Fixed-outline Floorplanning • Overview • Objective Function • Solution Perturbation • Experimental Results • Conclusions
Overview of Floorplanning • Sequence Pair is used for floorplan representation • Objective function • Solution perturbation • Remove a block randomly • Compute the floorplan of the blocks except the removed one • Select fixed number of candidate insertion points for the removed block by enumerating insertion points • Choose for the removed block one of the candidate insertion points randomly
Outline • Problem • Previous Work • Fixed-outline Floorplanning • Overview • Objective Function • Solution Perturbation • Experimental Results • Conclusions
Ew Eh H0 Fixed-outline W0 Objective Function • Objective functions used in the existing fixed-outline floorplanners. • Low success rate when given larger aspect ratios. • Low success rate when other objectives exist. • since the function values hardly reach zero when competitions from other objectives exist. • A trade-off between area and aspect ratios.
Objective Functions (Cont’) • Calculate chip area costs for fixed-outline floorplanning (assume λ>1) • EW = max(W −W0, 0) • EH = max(H − H0, 0) • C1 and C2 are user-defined constants • λ is the aspect ratio. • High success rates for large aspect ratios • High success rate when combined with other objectives Ew EH H0 W0
Outline • Problem • Previous Work • Fixed-outline Floorplanning • Overview • Objective Function • Solution Perturbation • Experimental Results • Conclusions
Solution Perturbation –Enhanced Remove and Insertion • Remove a block randomly • Insert the block • Select some candidate insertion points (CIP, totally 100 here) by Enumerating InsertionPoints (EIP) (rough estimation) • Select from the CIPs the insertion point for the removed block
Enumerate Insertion Points (EIP) • Sequence Pair (P, M) • (…bi…bj…, …bi…bj…) bj is left to bi • (…bi…bj…, …bj…bi…) bj is below bi • An insertion point means one position in P and one position M -- (p, m) • In order to evaluate an insertion point, we need to know how much inserting a block into the insertion point will contribute to the chip width and height
EIP – Computing x-coordinates • Given a Sequence Pair (P, M) • Coordinates (with origin at the bottom-left corner of the chip) of a block bi only depend on the blocks that are left to biin the sequence M • Coordinates of the blocks that are right to bi in both P and M are larger than that of bi ( a b c e d f g, a c b d e g f ) ( a b c e d f g, a c b d e g f )
EIP— Computing x-coordinates (Cont’) • Based on the previous observations, we can compute the x-coordinates of all insertion points • Given a sequence pair (P, M) = (f c e d b a, c b f a d e) Distance of CIPs (p, b+) to the left boundary: p is before c in P, 0; p is between b and c in P, 2; p is after b: 4. Distance of CIPs (p, c+) to the left boundary: p is before c in P, 0; p is after c in P: 2. ( f c e d b a, c b f a d e ) ( f c e d b a, c b f a d e )
Enumerating Insertion Points • Following pairs of sequences are scanned to compute the distance of an insertion point to the chip boundaries • (P, M): Distance to the left boundary • (Pr, M): Distance to the bottom boundary • (Pr, Mr): Distance to the right boundary • (P, Mr): Distance to the top boundary top P Mr left right M Pr bottom
Enumerating Insertion Points (Cont’) • The enumerating is similar to the computation of x-coordinates, but, for each time, we have to scan four lists simultaneously. • Without consideration of wire length, the complexity of enumerating is O(n2), which is linear with the number of insertion points. • During the enumerating, we take into account only the nets that have connections to the removed block. • a linear piecewise function is used for wire-length calculation.
Outline • Problem • Previous Work • Fixed-outline Floorplanning • Overview • Objective Function • Solution Perturbation • Experimental Results • Conclusions
Experimental Results-Success Rate • white space percent 10%, all blocks are hard, and the aspect ratios are chosen from the range [1,3] with interval 0.5. • Success rate: Parquet (SP) 60%, Parquet (BTree) 100%, NTU-FOFP 94%, IARFP 100%. • Runtime: IARFP is the least one. (a tenth part)
Experimental results-Wire • White space 10%, 50 runs for n100, 10 runs for n200 and n300. • Success rate: IARFP 100%, NTU-FOFP 45%, andParquet(SP) 34% • Wire: IARFPachieved 12% and 7% improvement • Runtime: IARFP spent much less time.
Experimental Results-Objective Function • Embed objective function into the existing fixed-outline floorplanner NTU-FP • White space: 10% • Aspect ratios: From the range [1,3] with interval 0.5
Outline • Problem • Previous Work • Fixed-outline Floorplanning • Overview • Objective Function • Solution Perturbation • Experimental Results • Conclusions
Conclusions • We developed a stable fixed-outline floorplanner • A new method for calculating area costs in fixed-outline floorplanning is proposed. • An enhanced remove and insertion solution perturbation method is implemented based on enumerating insertion points. • Compared with the existing method, the proposed method is very effective and efficient.