Download
1 / 20
600 likes | 1.59k Views
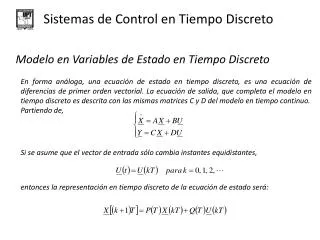
Sistemas de Control en Tiempo Discreto. Introducción: Tipos de Señales. Sistemas de Control en Tiempo Discreto. Introducción: Sistema de Control Discreto. Sistemas de Control en Tiempo Discreto. Multiplexión y Demultiplexión Muestreo y Retención Conversión A/D (Cuantización y Codificación)

E N D
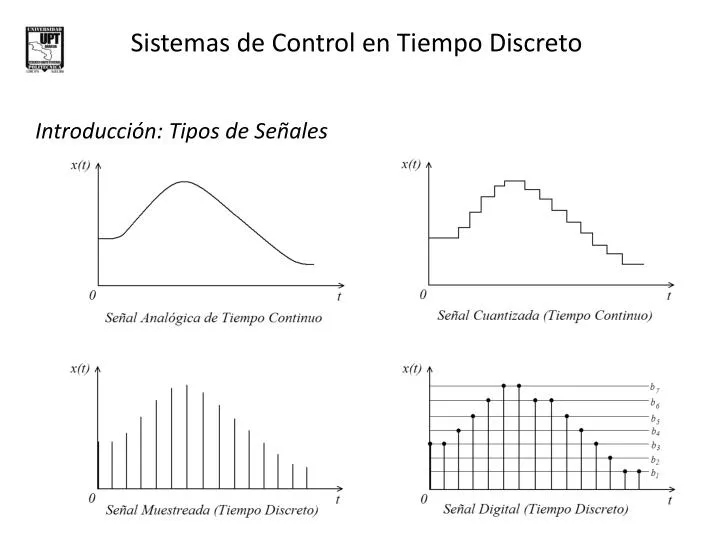
Sistemas de Control en Tiempo Discreto Introducción: Tipos de Señales
Sistemas de Control en Tiempo Discreto Introducción: Sistema de Control Discreto
Sistemas de Control en Tiempo Discreto • Multiplexión y Demultiplexión • Muestreo y Retención • Conversión A/D (Cuantización y Codificación) • Conversión D/A (Decodificación) Introducción: Operaciones Básicas
Sistemas de Control en Tiempo Discreto Introducción: Operaciones Básicas
Sistemas de Control en Tiempo Discreto Introducción: Circuito de Retención Es un dispositivo para la reconstrucción de señales continuas, a partir de una secuencia de valores discretos (señal de tiempo discreto). Otros tipos: de primer orden, interpolación poligonal, etc.
Sistemas de Control en Tiempo Discreto El Teorema de Nyquist-Shannon, establece que la frecuencia mínima de muestreo necesaria para evitar el “aliasing” debe ser: fm>2.BW BW: ancho de banda de la señal a muestrear (BW=fmax-fmin) Para señales con fmin = 0, se puede expresar como, fm>2.fmax Introducción: Teorema del Muestreo (Nyquist-Shannon)
Sistemas de Control en Tiempo Discreto Introducción: Teorema del Muestreo (Nyquist-Shannon) Aliasing: Las muestras D son un “Alias” de las muestras B
Sistemas de Control en Tiempo Discreto Introducción: Proceso de Muestreo Periódico
Sistemas de Control en Tiempo Discreto Aproximación de Tope Plano: Introducción: Proceso de Muestreo Periódico Así, Laplace:
Sistemas de Control en Tiempo Discreto Aproximación por series: Introducción: Proceso de Muestreo Periódico Se observa que el ancho de pulso “P” está actuando como un atenuador de la señal. Para evitar este inconveniente, se coloca un dispositivo de retención que mantenga el valor de la señal muestreada, quedando las expresiones finales:
Sistemas de Control en Tiempo Discreto Ejemplo:Se tiene un proceso de muestreo periódico como se indica: ¿Cuánto vale el período fundamental (cantidad de muestras hasta que se repite la secuencia) de la señal de tiempo discreto , si la señal de tiempo continuo tiene una frecuencia de 3 Hz ? Introducción: Proceso de Muestreo Periódico
Sistemas de Control en Tiempo Discreto Un sistema de tiempo discreto SISO tiene como representación la ecuación de diferencias general: donde es la entrada en el instante y es la salida en el instante Ejemplo: Se debe leer como que “el próximo valor de la salida es igual a su valor actual menos el doble del valor de la entrada presente” La “Ecuación de Diferencias Finitas” para el mundo discreto, es el equivalente a las ecuaciones diferenciales ordinarias del mundo continuo. Representación de los Sistemas Discretos: Ecuaciones de Diferencias Finitas
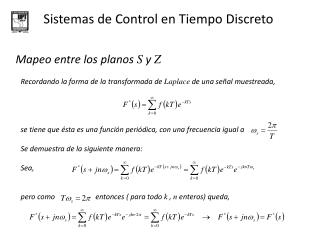
Sistemas de Control en Tiempo Discreto Dada una secuencia discreta, para y haciendo en la expresión de la transformada de Laplace de una señal muestreada, se define a la transformada Z como: En detalle: Transformada Z: Definición General
Sistemas de Control en Tiempo Discreto Considérese la función escalón unitario: Entonces, Pero se sabe por convergencia de series que la serie, converge a: si con lo que, convergerá como: si Transformada Z: Ejemplos
Sistemas de Control en Tiempo Discreto Considérese ahora la función: Luego, La convergencia de la serie es: para con lo que, Transformada Z: Ejemplos
Sistemas de Control en Tiempo Discreto Función continua: Función continua muestreada: Secuencia: Transformada de Laplace de una función continua muestreada: Transformada Z de una función continua muestreada (secuencia): Formalmente el asterisco * desaparece en la notación de la transformada Z ya que la transformada está definida sobre funciones discretas; sin embargo se puede escribir: entendiéndose que primero se muestrea y luego se aplica la transformada. Transformada Z: Nomenclatura y convenciones
Sistemas de Control en Tiempo Discreto Traslación Real: RETARDO Sea entonces, Haciendo resulta, ya que para , queda finalmente: Transformada Z: Propiedades
Sistemas de Control en Tiempo Discreto Traslación Real: ADELANTO. Sea entonces, Haciendo resulta Representando a las condiciones iniciales, queda finalmente: EJEMPLO: Transformada Z: Propiedades
Sistemas de Control en Tiempo Discreto CONVOLUCIÓN REAL Se recuerda que en tiempo continuo, la convolución real es: EJERCICIO: Demostrar la convolución real en tiempo discreto. Transformada Z: Propiedades
Sistemas de Control en Tiempo Discreto Hallar la transformada dadas, la ecuación de diferencias y las condiciones iniciales, SOLUCIÓN: Se tiene que, y luego, de donde: Obsérvese que se ha obtenido una función racional en Z, equivalente a la función racional en el plano S que se obtiene para una ecuación diferencial en tiempo continuo. Transformada Z: Ejemplo