Download
1 / 21
230 likes | 506 Views
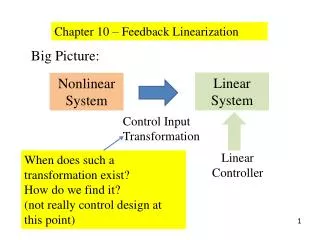
Feedback Linearization Based Guidance. G. Weiss. Project under the supervision of Dr. I. Rusnak. Control and Robotics Lab June, 2010. Outline. Objectives Project milestones Planar scenario description Guidance problem formulation Feedback linearization Guidance strategies

E N D
Feedback LinearizationBased Guidance G. Weiss Project under the supervision of Dr. I. Rusnak Control and Robotics Lab June, 2010 Technion, Faculty of Electrical Engineering
Outline Technion, Faculty of Electrical Engineering Objectives Project milestones Planar scenario description Guidance problem formulation Feedback linearization Guidance strategies Performance example Summary
Objectives Technion, Faculty of Electrical Engineering To examine the guidance problem of an acceleration-constrained homing missile when the initial missile heading is far from collision course using feedback linearization The presented work is based on the paper S. Bezick, I. Rusnak, and W. S. Gray, “Guidance of a Homing Missile Via Nonlinear Geometric Control Methods” ,AIAA Journal of Guidance, Control, and Dynamics, vol. 18, no. 3, May-June 1995, pp. 441-448.
Project Milestones Technion, Faculty of Electrical Engineering • Phase 1 • Study of the Feedback Linearization method • Validation of 2D simulation results presented in the paper • Performance analysis • Phase 2 • Derivation of 3D scenario guidance laws • Simulations • Performance analysis
Planar scenario description VT ΨT (xT , yT) VM RTM aT ΨM aM Target σ Reference direction (xM , yM) Missile Technion, Faculty of Electrical Engineering
Guidance problem formulation • Assumptions • Ideal aerodynamics • Constant velocities • Ideal autopilot • Full information knowledge Technion, Faculty of Electrical Engineering
Feedback Linearization Technion, Faculty of Electrical Engineering Consider the single input single output system find a state feedback control such that the input-output system from to is a linear mapping. Using Lie Derivatives, such a satisfies
Guidance strategies FLGL PN Technion, Faculty of Electrical Engineering Large heading error closing velocity resulting from Small heading error
Performance example Target Scenario Parameters VT Missile RTM σ ΨM VM Technion, Faculty of Electrical Engineering
Performance example RGL FLGL Target Ref Guidance Law Large heading error PN Small heading error Technion, Faculty of Electrical Engineering
Performance example tfinal = 6.5631 [sec] tfinal = 6.5415 [sec] PN RGL FLGL Technion, Faculty of Electrical Engineering
Performance example PN RGL FLGL Technion, Faculty of Electrical Engineering
Summary Technion, Faculty of Electrical Engineering Feedback Linearization method has been studied and implemented Simulation results have been validated successfully 3D implementation of FLGL is on the way
Technion, Faculty of Electrical Engineering Thank you all for listening
Backup Slides Technion, Faculty of Electrical Engineering Outline • Lie derivatives • End game geometry • Guidance strategies • Feedback linearization guidance law • Guidance loop • Minimum intercept time guidance law
Lie derivatives Let be sufficiently smooth in , the Lie Derivative of with respect to is denoted by Used notations: Technion, Faculty of Electrical Engineering
End game geometry predicted intercept point VT VM LOS Collision triangle Technion, Faculty of Electrical Engineering
predicted intercept point Guidance strategies Case 1: VM leading the Target VT VM leading the target LOS VM lagging the target Case 2: VM lagging the Target Technion, Faculty of Electrical Engineering
FeedbackLinearizationGuidanceLaw VCD1 = closing velocity resulted from VCD2 = leads to the rotation of Technion, Faculty of Electrical Engineering
Guidance loop description • Known target dynamics • Ideal missile autopilot Guidance Loop Block Diagram Technion, Faculty of Electrical Engineering
Minimum intercept time guidance law 21 Technion, Faculty of Electrical Engineering