Download
1 / 30
300 likes | 468 Views
Compliance in Robot Legs. Jonathan Hurst. Outline. Introduction What is the long-term goal of this work? What is the intent of this presentation? Background, motivation Running: Spring Loaded Inverted Pendulum (SLIP) Why are real springs important? Future work Current Research Hardware!

E N D
Compliance in Robot Legs Jonathan Hurst
Outline • Introduction • What is the long-term goal of this work? • What is the intent of this presentation? • Background, motivation • Running: Spring Loaded Inverted Pendulum (SLIP) • Why are real springs important? • Future work • Current Research • Hardware! • Simulation and Control (in collaboration with Joel Chestnutt) • Future work
Introduction • The long-term goal is to build a bipedal robot that can walk, run, jump, hop on one foot up stairs, recover from a stumble, and generally behave in a dynamically stable manner • The goal of this presentation is to convince the listener of the following: • Series compliance is essential for a successful running robot • Physically varying the stiffness of this series compliance is useful
Running • Animals • Compliant elements in limbs, used for energy storage • Energy consumption is lower than work output • The motion of the center of mass of a running animal is similar to that of a pogo stick, and is common to all animals [Blickhan and Full, 93]
Running • Running is loosely defined • Aerial phase • Energy transfer • The Spring Loaded Inverted Pendulum (SLIP) model [Schwind and Koditschek, 97] closely approximates the motion of a running animal’s center of mass • Assumes no leg dynamics at all during flight • Assumes lossless, steady state, cyclical running gait • Assumes point mass ballistic dynamics for mass Ideal, lossless model
SLIP • Control inputs: • Leg Touchdown Angle, q • Leg Stiffness, K • Spring rest position, X • Gait parameters at steady state [schwind, kod, 97]: • Leg + Ground Stiffness • Leg Length at the bottom of stance phase • Leg angular velocity at the bottom of stance • OR • Stride Length • Hopping Height • Leg + Ground Stiffness
SLIP: Observations of Animals • Animals maintain a relatively constant stride length, and change leg stiffness for these reasons: • Changing ground stiffness • Different speeds within a gait • Changing gravity or payload • Ground stiffness changes are a bigger problem for bigger animals[Ferris and Farley, 97]
SLIP: stiffness adjustment vs. mass • From experimental observations, leg stiffness scales with animal body mass[Farley, Glasheen, McMahon, 93]: • Springs in series add as inverses: • Ground stiffness changes significantly for different terrain types • The lower the leg stiffness, the less global stiffness is affected by changing ground stiffness
SLIP: • Observations of animal behavior gives us hints, not proofs • Do we really need a physical spring, or is spring-like behavior achievable without one? • Springs are needed for energetic reasons • Springs are needed for power output reasons • Springs are needed for bandwidth reasons
Energetics • Energy consumption should be minimized when designing and building a running robot • Tether-free • Large payload capacity • Long battery life • Natural dynamics affect energy consumption • Mimicking the control model (SLIP) with the system’s natural dynamics is a good idea. So far, every running robot has used physical series springs.
Energetics: CMU Bowleg • 70% spring restitution • Mass distribution: • 0.8% spring • 5% batteries • 20% entire mechanism • 80% ballast • Used a spring hanging from the ceiling to simulate operation in 0.35G • Tensioned leg spring during flight • If a slightly larger motor replaced some ballast weight, the Bowleg could hop in 1G, but not without the spring
Energetics: ARL Monopod • The most energy-efficient legged robot • Running speed of 4.5 km/h • Total power expenditure of 48W • 10.5 Joules of energy exerted by leg motor in each hop, for 135J of mechanical work
Energetics • A 4kg robot hopping 0.5m high yields a flight phase of 0.632 seconds • Assume stance and flight are symmetrical: • Constant force of 40N • Work output of 20J • Power output of 32W • Robot with series spring and 70% restitution: • Constant force of 40N • Work output of 6J by the motor, 14J by the spring • Power output of 3.8W by the motor, 28.8W by the spring • Violating the assumption of constant force spring only enhances the difference, favoring the series-spring method
Bandwidth Considerations • Reflected rotor inertia dominates the natural dynamics • Inertia is proportional to the square of the gear reduction • Given the following values: • Gear reduction = 16 rev/m • Rotor inertia = 0.00134 kg-m2 • Reflected inertia of the motor is equivalent to leg mass of 13.5 kg • Kinetic energy in leg momentum is lost as an inelastic collision with the ground (a high-frequency input) • For a 30kg robot, much of the energy will be lost in an inelastic collision, and cannot be recovered through the electric motor
Summary of the facts so far: • Animals have leg compliance • SLIP • Stride Length • Hopping Height • Leg + Ground Stiffness • Animals physically vary leg stiffness • Series springs are important: • Bandwidth • Power • Energy
Further Research • I think variable stiffness is important for a human-scale legged robot • The extent to which physically variable stiffness is important should be calculable • Can’t make the stride length longer • Can’t lower hopping height • Stiffness is the only thing left!
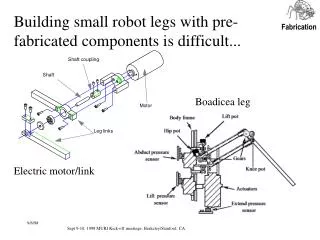
Current Research • Actuator with physically variable compliance • 2-DOF device, 1-DOF actuator • Motor 1: spring set point • Motor 2: cable tension=spring stiffness
Mechanism Design • Cable drive • Lightweight – about 3 kg • Fiberglass springs for high energy density • Spiral pulleys impart nonlinearity to spring function • Electric motors allow for precise control • Very low friction on the “leg” side of the springs
Motor Position time Leg Position time
Performance • We created a plot of comparative max force against frequency. • Peak spring force is measured on two models: • The dynamic simulation, with physically realistic spring adjustment limits and the controller on M1 • An idealized simulation, with no spring adjustment limits and M1 held stationary • X2 is forced to a sine function, cycling from 1 to 100 Hz • If the Bode plot for the dynamic simulation were divided by the Bode plot for the idealized simulation, this would be the result.
Frequency-Magnitude Plots • Physical adjustment is limited to 10 kN/m • Two discrepancies are apparent: • 0.78 is the difference between f=kx, described by the software controller, and the polynomial fit of our physical spring function • 0.6 is the difference between the peak forces of the natural dynamics of the two systems
System validation • We built a simulation of a runner with the full dynamic model of the actuator built in – so it’s almost a SLIP • Raibert-style controller commands leg angle, energy insertion for a SLIP
Future Work • Show analytically how bandwidth is affected by the various parameters and situations of the actuator • Calculate the required range of variable stiffness, and rate of change • Put a hip on this thing, make it hop • Research and implement controllers for hopping height, stride length, speed on a step-to-step basis • Working with a team, build and control a running biped that can hop on one foot up stairs