Download
1 / 1
10 likes | 633 Views
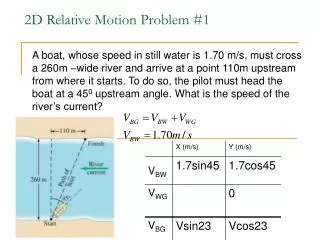
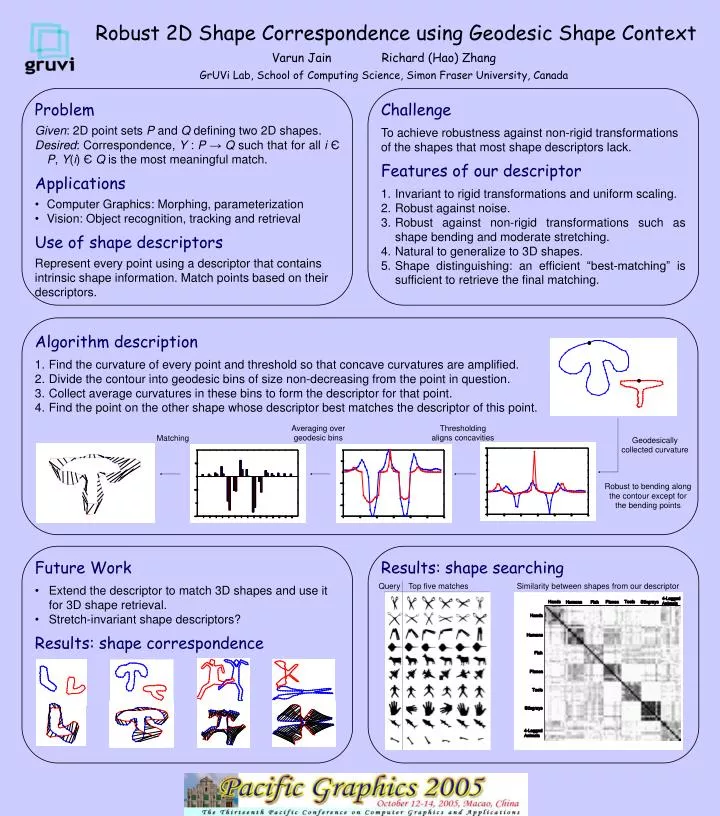
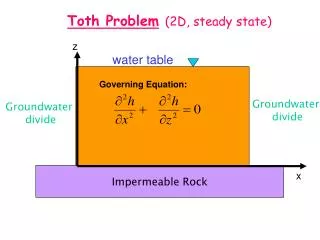
Robust 2D Shape Correspondence using Geodesic Shape Context. Varun Jain Richard (Hao) Zhang GrUVi Lab, School of Computing Science, Simon Fraser University, Canada. Problem Given : 2D point sets P and Q defining two 2D shapes.

E N D
Robust 2D Shape Correspondence using Geodesic Shape Context Varun Jain Richard (Hao) Zhang GrUVi Lab, School of Computing Science, Simon Fraser University, Canada • Problem • Given: 2D point sets P and Q defining two 2D shapes. • Desired: Correspondence, Y : P → Q such that for all i Є P, Y(i) Є Q is the most meaningful match. • Applications • Computer Graphics: Morphing, parameterization • Vision: Object recognition, tracking and retrieval • Use of shape descriptors • Represent every point using a descriptor that contains • intrinsic shape information. Match points based on their • descriptors. • Challenge • To achieve robustness against non-rigid transformations • of the shapes that most shape descriptors lack. • Features of our descriptor • Invariant to rigid transformations and uniform scaling. • Robust against noise. • Robust against non-rigid transformations such as shape bending and moderate stretching. • Natural to generalize to 3D shapes. • Shape distinguishing: an efficient “best-matching” is sufficient to retrieve the final matching. • Algorithm description • Find the curvature of every point and threshold so that concave curvatures are amplified. • Divide the contour into geodesic bins of size non-decreasing from the point in question. • Collect average curvatures in these bins to form the descriptor for that point. • Find the point on the other shape whose descriptor best matches the descriptor of this point. Averaging over geodesic bins Thresholding aligns concavities Matching Geodesically collected curvature Robust to bending along the contour except for the bending points • Future Work • Extend the descriptor to match 3D shapes and use it for 3D shape retrieval. • Stretch-invariant shape descriptors? • Results: shape correspondence Results: shape searching Query Top five matches Similarity between shapes from our descriptor



![Formula’s and Properties Of 2D and 3D Shapes.! :]](https://cdn3.slideserve.com/6593022/formula-s-and-properties-of-2d-and-3d-shapes-dt.jpg)