Download
1 / 19
890 likes | 4.66k Views
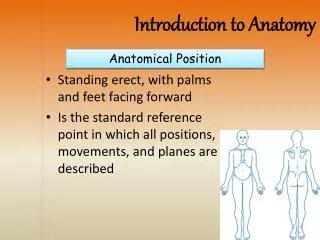
Axes and planes (fundamental positions and movements). 3 rd Lecture 2-11-2013. Dr .Manal Radwan Salim Lecturer of Physical Therapy Pharos University. Axes and planes. Three imaginary planes (Cardinal) divide the body in half by mass are known as the: 1-Sagittal 2-Frontal

E N D
Axes and planes (fundamental positions and movements) 3rd Lecture 2-11-2013 Dr .Manal Radwan Salim Lecturer of Physical Therapy Pharos University
Axes and planes Three imaginary planes (Cardinal) divide the body in half by mass are known as the: 1-Sagittal 2-Frontal 3-Transverse planes (Horizontal).
The Sagittal plane The median plane divides the body vertically into left and right halves Any plane parallel to the median plane is called a sagittal plane in which forward and backward movements of the body occur. Movements in this plane can be seen from the side. e.g: Flexion / Extension dorsiflexion plantarflexion
The frontal plane The frontal plane splits the body vertically in front (anterior) and back (posterior) halves in which lateral movements of the body occur. - Movements in this plane can be seen from the front or back e.g: Abduction Adduction, lateral flexion
The transverse plane The transverse plane separates the body into top (superior / upper) and bottom (inferior / lower) halves in which horizontal body and body segment movements occurs when the body is in the erect standing position. -Movements in this plane can be seen from the top or bottom e.g: shoulder rotation -This movements rotate around the longitudinal axis -The longitudinal axis is perpendicular to the transverse plane
Anatomical reference axes When a segment of a human body moves, it rotates around an imaginary axis (line/rod) of rotation that passes through a joint to which it is attached. The rotation around that imaginary axis occurs perpendicular to plane of motion. Rotation occurs perpendicular to the axis.
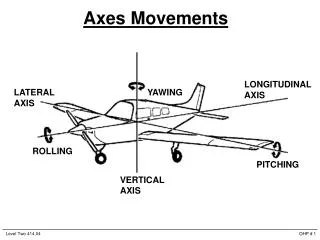
Definition of axis of rotation: - an imaginary line about which the body rotates or spins, at right angles to the plane. There are three axes: 1-The Frontal (Mediolateral) axis. 2-The Longitudinal (Vertical) axis. 3-The Anterior-posterior (Sagital) axis.
The Frontal (mediolateral) axis The Frontal axis (mediolateral): is an imaginary line around which sagittal plane rotations occur. e.g: Flexion / Extension -The frontal axis is perpendicular to the sagittal plane
The Anterior-posterior (sagittal ) axis The Anterior-posterior (Sagital) axis : is an imaginary line around which frontal plane rotations occur. e.g: Abduction Adduction -The sagittal axis is perpendicular to the frontal plane
The Longitudinal (vertical) axis The Longitudinal axis: is an imaginary line around which transverse plane rotations occur. i.e. medial and lateral rotations movements, supination and pronation. -The longitudinal axis is perpendicular to the transverse plane
III. Degree of Freedom *It is the movement of a joint in a plane a single degree of freedom (df ). *for example the hip joint, has 3 dfs flexion and extension in the sagital plane, abduction and adduction in the frontal plane, and internal and external rotation in the transverse plane. *If human movements were confined to single-plane motion, we would look like robots as we performed our skills or joint motions.
Joint classification according to allowed degree of freedom 1- Uniaxial joint: A joint with 1 df since there is one axis perpendicular to the plane of motion about which movement occurs ex elbow joint that allows only flexion and extension in the sagital plane. 2- Biaxial joint: A joint with 2 df ,ex. Wrist joint that allows flex. and ext., radial and ular deviation. 3- Triaxial joint: A joint with 3 df ,ex. hip joint that allows flex. & ext., abd. & add, int rot.& ext. Rot.
Movement in the sagittal plane about the frontal axis McGinnis, (1999)
Movement in the transverse (horizontal) plane about the vertical axis
IV. kinematic chain • is derived from combining degrees of freedom at various joints to produce a skill or movement. • The chain is the summation of the degrees of freedom in adjacent joints that identifies the total degrees of freedom available or necessary for the performance of a movement.
For example, kicking a ball might involve an 11-df system relative to the trunk. This would include perhaps 3 df at the hip, 2 df at the knee, 1 df at the ankle, 3 df in the tarsals (foot), and 2 df in the toes.