Download
1 / 23
370 likes | 1.22k Views
MEMS Microelectromechanical Systems NEMS Nanomechanical Systems and NanoDevices. Introduction. MEMS are interdisciplinary in their design, fabrication, and operation. They encompass many aspects of Engineering

E N D
MEMSMicroelectromechanical SystemsNEMSNanomechanical Systems and NanoDevices
Introduction • MEMS are interdisciplinary in their design, fabrication, and operation. They encompass many aspects of • Engineering • Mechanical (structures and phenomena: bending, deflecting, oscillations, vibrating; fluid dynamics…) • Electrical (electrical signals: detected, generated, processed; optoelectronics; Integrated circuits and devices…) • Chemical and Biochemical (reactions, processes, and kinetics… of many systems including living organisms) • Science • Physics and Biophysics (external world vs. materials/properties including living organisms at macro and nano scale) • Chemistry, biochemistry, and physical chemistry (step more from corresponding engineering disciplines towards basic answers) • Biology (macro and nano effects in plants, animals, and humans observed by smart transducers) • Technology • Macro ex. Fluidics and large mechanical structures • Micro ex. µm scale dimension of transducers, and • Nano ex.nanodevices CNT, nanoprobes ….)
Integration of Various Scienceand Engineering Fields Very powerful performance possible but difficulty in realization comes due to the interdisciplinary character of MEMS
Building Blocks • Major components in MEMS systems include • Design • Much more difficult than IC designs due to the interdisciplinary character of MEMS • Design includes packaging • Packaging is one of the most challenging step both in design and realization • Transducers must be integrated with electronics • Integration with ICs is another challenge for MEMS due to difficult issues of process compatibility • Fabrication • Silicon technology is widely used in MEMS with new step added • Dimensions are usually much larger than those in ICs even for nano-transducers. To feel NANO you do not need to be in the nano-scale size! • Other materials are included to perform required functions of transducers • MEMS are frequently integrated with fluidics (polymers, glass…) • Materials • Materials that can perform required functions (thermo, piezo-, magneto-resististance…) • Interaction with fluidics (half-cell potential, corrosion…)
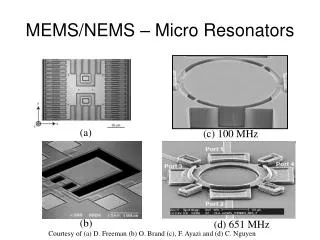
MEMS as a part of CMOS integrated systems High complexity of MEMS elements possible (multi-functional sensing) together with advanced electronic detection/signal processing. The trend is to operate sensors in the rf-regime.
History of MEMS • Elements of MEMS are almost as old as Integrated Circuits (1965???), they originated from ICs but found wide acceptance and applications much later. • First MEMS structures evolved from modification of Si processes (1970) : • Membranes, cantilevers, nozzles • and by introducing new materials: • piezoelectric, piezoresistive, now: nitrides, diamonds …., porous silicon (large active sensing area) • thus producing • Pressure sensors of high sensitivity also for harsh environment operation, chemical capacitive sensors.
Newer History • Silicon micromachining started in 1980s: • Bulk micromachining, which uses silicon substrate (more 3D structures) such as in-jets (also for biological molecules • surface, which uses thin silicon films more 2D structures): springs, gear trains, rotors…..
MEMS were born. • Rapid growth of MEMS in 1990s (Japan, Europe, then …US). Many types of MEMS developed: mechanical, electrical (wired&wireless), optical, chemical ….
Mechanical Structures Were Developed First • Electromechanical MEMS sensors became very popular: beams, membranes, hinges …. • Advantages over macroscopic systems: sensitivity, miniaturization, low noise. • Applications: pressure sensors, accelerometers, gyroscopes, micromirrors (digital multimedia)
Micromechanical Structures • Micromirrors (>100k) in a Digital Light Processor by Texas Instruments the idea came from etching experiments. • Addressed individually using row-column multiplexing (SRAM in CMOS): Digital Micromirrors (10x10µm2) • Advantages: bright, high contrast, stability … • Applications: image projection, optical communication and others maskless lithography, DNA microarrays for light assisted synthesis.
Micromechanical Structures • Mechanical structures as electrical elements Tunable capacitor & tunable inductor
BioMEMS=Biological MEMS • BioMEMS are used in biology, biophysics, biochemistry, medicine, and pharmacy
Micro- mechanics Micro-optics MOEMS Micro-electronics Communication from/to/within MEMS • Traditional electrical signals • Optical communication: microoptoelectromechanical systems MOEMS (speed is important) Optical signals switched traditionally by optical/electrical/optical (OEO) transformation: Turning optical signals into electrical using optical receiver arrays Electronics signal processing Transforming signals back to optical domain Includes optical Elements and interconnects Or directly using optical switches
Intrinsic Characteristics of MEMS • Miniaturization: dimensions of MEMS structures are much larger than in VLSI ICs (µm). Further scaling leads to NEMS (nano) that are comparable/smaller than ICs (1-100 nm). • Scaling laws describe how properties/behavior change with dimensions • Scaling of spring constants (ex. behavior of cantilevers • Scaling Law of Area-to-Volume Ratio (important in all surface effects: forces friction, tension, van der Waals etc) • Microelectronics Integration - the most widely used is that with CMOS E- Young modulus of elasticity; l, w, t - dimensions Decreasing length of cantilever: smaller spring constant, higher resonance frequency (GHz) and quality factor (50,000), better sensitivity
Scaling and DimensionsSpecifically important in Bio-applications
Devices: Sensors and Actuators Energy domains and Transducers
Sensors • Fall into two categories: • Physical: force, acceleration, pressure, temperaure, magnetic/electric field strength etc. • Chemical/biological: pH, reactions, binding between molecules etc. • Characteristics: • Sensitivity • Linearity • Responsivity (large signal-to-noise ratio SNR required) • Johnson noise, a with noise , thermal fluctuation, (k=Boltzmann’s constant, R=resistance, B=bandwidth), Gaussian distribution • Shot noise (quantum fluctuation) • 1/f noise or flicker (pink) noise,(conductance fluctuation when currents flow) • Thermal-mechanical noise floor (mechanical motion of elements) • SNR • Dynamic range (highest to lowest signals) • Bandwidth (bandpass) • Drift (degradation and change of operational points) • Sensor reliability (related to stability of operation independently of conditions) • Cross talk or interference (individually tested parameters should not be affected by other measurements/signals) • Development cost and time (vary depending on designs and technology, simulations are very important in shortening the time-to market)
Actuators • Transform energy from/to the mechanical domain into/from others: electrical (piezoelectricity, electrostatic), thermal, magnetic etc.
Design aspects of actuators • Torque and force output capacity. Sufficient force must be delivered as a response of the sensed phenomena. • Range of motion. Should be adequate to the sensed phenomena. • Dynamic response speed should be fast and bandwidth adequate. • Ease of fabrication and availability of materials used for MEMS fabrication. • Power consumption should be small (portable devices) and energy efficiency high. • Linearity of displacement as a function of driving bias. • Cross-sensitivity and environmental stability. • Footprint=total chip area. Arrays frequently used for complementary measurements.