Download
1 / 83
830 likes | 1.18k Views
Elektrometrik Konum Belirlemede Kullanılan Aletler. 1. Hidrodist

E N D
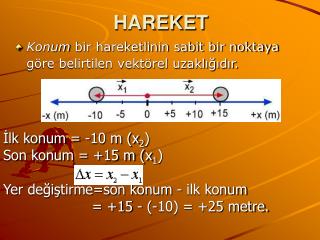
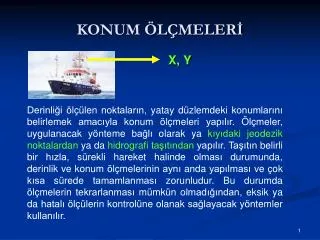
Elektrometrik Konum Belirlemede Kullanılan Aletler 1. Hidrodist Hidrodist, hidrografik amaçlar için geliştirilmiş mikro dalgalarla uzunluk ölçümü yapan bir tellürometre sistemidir. Hidrografi taşıtının konumu, ölçülen iki uzunluğun fonksiyonu olarak bulunur. Ana alet (master), ölçmelerin yapıldığı hidrografi taşıtında, 2 adet karşı alet (remote) kıyıdaki iki jeodezik noktada bulunur. Hidrografi taşıtından ölçülen iki uzunluğun kesiştirilmesi ile, iskandil yapılan noktanın konumu belirlenir. Hidrodistlerin çok kullanılan MRB-2 modelinde sistem, 2 ana alet ile, 2 karşı aletten oluşur. Ana aletler, küçük ve taşınabilir olduklarından küçük botlarda da kullanılabilmektedir. Karşı aletler, kıyıdaki iki jeodezik noktaya yerleştirilir. Her ana alet, kendi karşı aleti ile sürekli olarak çalışır. Ölçme için, karşılıklı aletler arasında kesintisiz gözlem gerekli olduğundan jeodezik istasyonların, arazi ve ölçme sınırı koşullarına uygun seçilmesi zorunludur. Hidrodist MRB-2 nin maksimum ölçme sınırı 40 km, inceliği ise, 1,5 metredir.
Elektrometrik Konum Belirlemede Kullanılan Aletler • 2. Elektronik Teodolit • Hidrografi alanında elektronik teodolit olarak adlandırılan ve hidrografi gemisine yerleştirilen mikro dalga konum belirleme sistemi, gemi ile kıyıdaki 3 jeodezik nokta arasında oluşan 2 kestirme açısını elektronik olarak ölçmektedir. Kıyıdaki jeodezik noktalara 1,6 KHz lik impuls frekansı ile 120 lik yatay genişlikte yayın yapan gönderici aletler yerleştirilir. Gemideki alette (ana alet) yaklaşık olarak 1 lik yayın (transmisyon) genişliği olan bir dönel reflektör bulunur.
Elektrometrik Konum Belirlemede Kullanılan Aletler • Sistem çalışmaya başladığı zaman ana alet, kıyıdaki istasyonlardan gelen 3 ayrı maksimum işarete (sinyale) göre 2 açı ölçer. Açıları kaydetmek için 2 sayaç vardır. Bunlardan birincisi ilk istasyondan alınan maksimum sinyalle açılır ve ikinci istasyondan alınan maksimum sinyalle kapanır. İkinci sayaç, birinci sayacın kapanma anında açılır ve üçüncü istasyondan maksimum sinyal gelince kapanır. Her sayacın açık olduğu süre içinde açı bölümleri, sayaçlara girer ve kıyı istasyonları arasındaki açılar, alıcı antenin bir defa dönmesi ile elde edilir. Sayaçlardaki açı değerleri, başka bir ölçüm serisi başlayıncaya kadar saklanır
Elektrometrik Konum Belirlemede Kullanılan Aletler • Sistemin kesinliği, kuzey doğrultusuna bağlanmak suretiyle sağlanır. Anten daima sağa doğru döner ve daima birinci maksimum sinyali kuzey doğrultusunu geçtikten sonra 1. Hedef olarak alır. Ana aletin anteni saniyede 1 devir hızla döndüğünden her iki açı, konum inceliğini etkilemeyecek bir hızla ölçülmüş olur. Aletin en küçük gösterge birimi, 0.02 dir.
Elektrometrik Konum Belirlemede Kullanılan Aletler • 3. Elektronik Konum Gösterici (E.P.I) • Elektronik konum göstericisi (Elektronik Position Indicatör = E.P.I) açık denizlerde yapılacak hidrografik çalışmalar için geliştirilmiştir. E.P.I, Shoran ve Loran tekniğinin bir kombinasyonudur. Sistemde uzun dalga boylu impulslar kullanılır. Bununla yeryüzü eğriliğinin etkisi azaltılmakta ise de, geri dönen elektromanyetik dalgalar osiloskopta net bir şekilde oluşmadığından sistemin inceliği düşüktür. Ölçme sınırı 700 km, inceliği 5 metredir. • E.P.I.’nin temel ilkesi : Gemide bulunan ana aletten, iki jeodezik istasyona yerleştirilen karşı aletlere radyo impulsları gönderilir. Bu impulslar, karşı istasyonlardaki operatörlerin kontrolü altında gemiye geri gönderilir. İmpulsun seyir süresi, gemideki alet tarafından ölçülerek zaman cinsinden uzaklık elde edilir. Geminin konumu iki uzaklık dairesinin kesişme noktası olarak belirlenir.
Elektrometrik Konum Belirlemede Kullanılan Aletler • Loran Sistemi • Loran "Long Range Navigation" kelimelerinden türetilmiş bir isimdir. Uzak mesafeli hiperbolik konum belirlemesi için ultra yüksek frekans transmisyonu önerisine dayanılarak geliştirilmiştir. Aralarında birkaç yüz km uzaklık bulunan ve yüksek frekanslı impuls yayan bir çift senkronize kıyı istasyonu ile gemi veya uçak arasında 500-800 km.ye kadar uzunluklar ölçülebilmektedir. Loran vericilerinde 1700 ile 2000 KHZ arasında radyo frekansları kullanılmaktadır. Bu frekans sınırı Standart Loran Bandı olarak bilinmektedir. Verici cihazlar100 kW çıkış gücü ile 50 mikro saniye uzunluğunda impulslar göndererek, deniz üzerinde 1000 km.lik, karada ise 200 km.lik bir ölçmeye olanak sağlarlar. Geceleri iyonosferden yansıyan dalgalar kullanılmak suretiyle bu sınır, 2500 km.ye kadar arttırılabilir. İyonosfer dalgalarının kullanılması durumunda yer dalgaları için hazırlanmış harita ve planlarda düzeltmeler yapmak gerekir.
Elektrometrik Konum Belirlemede Kullanılan Aletler • Loran ağı, genellikle kıyı boyunca birkaç istasyonu kapsayan zincir şeklinde tesis edilirler ve bu istasyonlar arasındaki uzaklık 200 ile 500 km arasında olur. Loran sistemi, okyanuslar gibi geniş alanlarda "uzun mesafe gözlemleri" için geliştirilmiş olduğu için kıyılardaki istasyonların oluşturduğu ağların uzunluğu birkaç bin km.yi bulabilir. Dolayısıyla birkaç bağımsız istasyon çiftinin aynı zamanda çalışması ve belirli olan ölçmelerin yapılması gerekli olmaktadır. Bütün Loran İstasyonları 1700 ile 2000 KHZ arasındaki frekans bandında çalışmalarına karşın, genellikle 4 değişik kanal ve frekans kullanılmaktadır. • Standart Loran inceliği; elektromanyetik dalgaların doğrudan gönderilmesi halinde (gündüz yapılan ölçmeler için ) kısa uzaklıklarda ±270 metre, 1200 km.de ise ±2.5 km.ye ulaşır. Gece yapılan ölçmelerde (İyonosfer dalgalarının kullanılması halinde) 500 ile 2500 km için ortalama konum inceliği ±2.5 km ile ±14 km arasındadır. Standart Loran sistemi, yalnızca navigasyon ve istikşaf ölçmeleri için uygun olup, harita alımları için Loran-B ve Loran-C sistemleri geliştirilmiştir.
Elektrometrik Konum Belirlemede Kullanılan Aletler • Loran-B Sistemi • Bu sistemde impuls karakteristikleri, kanal frekanslar ve tekrarlama hızları Standart Loran ile aynıdır. Loran-B de 2 MHz lik faz karşılaştırma sistemi ile yüksek ölçme inceliği elde edilmektedir. Sistemin taşıyıcı dalga frekansı 1.85-1.95 MHz, band genişliği 35 KHz dir. Taşıyıcı dalgaların faz farkları, impulslar içinde ölçülmek suretiyle elde edildiğinden 2MHz transmisyonlu bir faz karşılaştırma sistemi söz konusu olmakta ve gönderici gücün azaltılması ile kısa impulslar da daha uzun ölçme sınırı sağlanmaktadır. Ayrıca impuls frekansında kaba konum belirlemesi belirsizlikten kurtarılmıştır. Loran-B ile sağlanan incelik, birkaç mili mikro saniye ve standart hata 0.01 mikro saniye kadardır.
Elektrometrik Konum Belirlemede Kullanılan Aletler • Loran-C Sistemi: • Loran-C sistemi, 90 ile 110 KHz taşıyıcı dalga frekansı ile çalışmaktadır. 100 KHz de yer dalgalarının yayılması oldukça stabildir. Loran-C nin band genişliği 20 KHz dir ve 3500 km'ye kadar uzunlukların ölçülmesine olanak sağlamaktadır. Elde edilen oransal incelik yaklaşık 1/90 000 mertebesindedir. Bu ise açık denizlerde ve okyanuslarda yapılacak hidrografik çalışmalar için yüksek bir inceliktir.
Elektrometrik Konum Belirlemede Kullanılan Aletler • İki bazlı Decca Sistemi • İki bazlı Decca sistemi, Standart Decca sisteminin bir varyasyonudur. Bu sistemde de istasyon çiftleri, hiperbolik konum eğrileri ailesi oluştururlar. Ana istasyon her çiftte bulunmakta ve dolayısıyla üç istasyon dizisi, konum belirleme için yeterli olmaktadır. Bu sistemin üstünlüğü, birçok geminin aynı zamanda kullanılabilmesi, konum belirleme için yalnız bir alıcı aletin yeterli olması ve bunun herhangi bir gemiye yerleştirilebilmesidir. • İki bazlı Decca zincirinde, kıyıdaki iki karşı istasyondan konumu belirlenecek bir gemiye, ana verici ile standart tipte bir Decca alıcısı yerleştirilir. Alıcıya bağlı Dekometreler, ana işaret ile karşı istasyonlardan alınan işaretlerden birisi arasındaki faz farkını gösterir. Bu faz farkı, transmisyon yörüngesinin doğrusal bağıntısı olmaktadır. Uzaklıklar, dekometreler yardımıyla elde edildiklerinden burada dairesel uzaklık yöntemi söz konusudur.
İki bazlı Decca Sistemi • İki bazlı Decca donatımının standart tipten tek ayrıcalığı, gemide kullanılan ana istasyon verici antenidir. Bu antenin şekli genellikle geminin cinsine bağlıdır. İki bazlı Decca sisteminin ölçme alanı ortalama 400 km, inceliği ise 20 metredir.
Elektrometrik Konum Belirlemede Kullanılan Aletler • Kısa Uzaklık Decca Sistemi (Hi-Fiks) • Hi-Fiks yüksek incelikli, hafif bir elektronik konum belirleme sistemi olup, kısa uzaklıklar için geliştirilmiştir. Sistemin normal kullanılma uzaklığı 8-60 km dir. Alıcı, verici istasyona daha da yaklaştırılmak suretiyle, inceliği azaltılmadan ölçme yapılabilir. Hi-Fiks sisteminde standart Decca sistemine oranla 20 kat daha yüksek frekans kullanılmaktadır. Sistemde bir ana ve iki karşı olmak üzere üç verici istasyon bulunur. Bunlar, hiperbolik veya dairesel yönteme göre konum belirlemesine olanak sağlarlar. Sistemin ölçme sınırı, ortalama 35 km, baz doğrultusundaki hatası 1 metredir.
Uydu Sistemleri • Uzaydan konum belirleme sistemleri, yeryüzündeki veya yer yüzeyinin yakınındaki noktaların konumlarını belirlemek için, uzak mesafede veya yörüngedeki bir cisimden yayılan elektromagnetik dalgalardan faydalanarak geliştirilmiş sistemlerdir. Bu tanımlama çerçevesinde sistemler; klasik konum belirleme ve navigasyon amacıyla kullanılabilirler. Bütün uzay konum belirleme sistemleri, uzay teknolojisine paralel olarak 1957’lerden sonra geliştirilmiştir. • Günümüzde kullanılan GPS, Transit ve Rusların geliştirdiği GLONASS, başlangıçta savunma ve askeri amaçlarla yapılmışlardır. Askeri amaçlı olduğu için tek yol sistemlerdir. Yani sinyaller uydulardan alıcılara doğru gönderilir. Alıcının konumunun hiç bir zaman bilinmemesi gerekir. Bütün uydu konum belirleme sistemleri, dünya merkezli bir koordinat sistemi içinde bir alıcının yer koordinatlarını veya birkaç alıcı arasındaki baz vektörünü ölçerler.
Uydu Sistemleri • Global Positioning Sistem (GPS) • NAWSTAR - GPS sistemi ABD Savunma Bakanlığı tarafından geliştirilmiş uydu konum belirleme sistemidir. Ayrıca, ölçmeler her çeşit hava koşullarında, gündüz ya da gece yapılabilir. GPS, Transit sistemin yerini almasının yanında, uyduların eşzamanlı görünebilirlikleri ile uydu gözlemlerindeki başlıca hata kaynakları giderilerek uzunluklar hassas olarak daha kısa zamanda ölçülebilir. GPS üç kısımdan oluşmaktadır. Uydular, kontrol sistemi ve kullanıcılar. • Global konumlama sistemi, konum ölçmeleri ve navigasyon için kullanılır. Sistem 4 uydu için geliştirilmiştir. Bu uydular, altı yörüngeden birine, ekvatora 55 derecede ve yerden 22 000 km yüksekliğe yerleştirilmiştir. Uydular, dünyanın çevresinde 11 saat 58 dakikada döner. En fazla 10, en az 4 uydu aynı zamanda görülebilir.
Uydu Sistemleri • Sistem için geliştirilmiş orijinal yöntemde konum belirlemesi için 4 uyduya ihtiyaç vardır. Alıcının üç boyutlu konumunun bilinmeyenlerine ek olarak 4. bilinmeyende eklenir. Bu uydu saati ile alıcı saatinin ayrılığıdır. Dört bilinmeyen dört denklemle çözülebilir ve bir nokta için dört uydu gerekir. Bir bilinmeyen için değer bulunarak, konum sabitlemeye üç uyduyla devam edilebilir. Denizde, su yüzeyi ile WGS 84 elipsoidi arasındaki ilişkinin belirlenebildiği derinliklerde üç uydu sabitleme sık kullanılır.
Uydu Sistemleri • Uyduların yayınladığı kodlanmış mikro dalgalar, yer üstünde konumu belirlenecek noktanın üzerine merkezlenmiş alıcı yardımıyla alınır ve kodları çözülür. Uyduda bulunan atom saati, alıcıda bulunan quarz saatleri yardımıyla mikro dalganın uydudan alıcıya geliş zamanı hesaplanır. Bu fark ile ışık hızının çarpımı; uydu ile alıcı arasındaki uzaklığı verir. Noktanın koordinatlarını belirlemek için noktadan 3 uyduya olan uzaklığı aynı anda ölçmek gerekir. Uyduların konumları yardımıyla noktanın konumu, uzay geriden kestirme ile ölçülür. İnceliğin artması için 4. bir uyduya gözlem yapılır. Yer istasyonun koordinatları, geosentrik koordinat sistemine (x,y,z) veya WGS84 elipsoidine (f,l,h) göre bulunur.
Uydu Sistemleri • Yüksek doğruluklu sonuçların gerçek zamanda elde edilmesi güç olmasına karşın, çalışma ve veri işleme yöntemleriyle bu hatalar elimine edilir. GPS ile konumlamada doğruluğu etkileyen temel hatalar, sistemden (uydu yörünge ve saat hataları) ve ortamdan kaynaklanır. Uyduların yeryüzünden uzaklığı dikkate alınırsa, yeryüzünde birbirine yakın noktalardaki hata değerlerinin yaklaşık aynı olacağı söylenebilir. DGPS yönteminde temel prensip, konumu iyi bilinen bir referans noktasındaki alıcıda hesaplanan anlık düzeltme değerleri kullanılarak 0-500 km uzaklıktaki alıcıların hatalı konumlarının iyileştirilmesidir.
Uydu Sistemleri • Pratikte yaygın olarak kullanılan kod ölçüleri ile DGPS yöntemi için ifade edilen konum hata değerleri, dinamik platformlardaki uygulamalar için sabit alıcı ile gezen alıcı arasındaki uzaklığa bağlı olarak 1-20 metre, statik uygulamalar için ise 1-5 m arasında değişmektedir. Faz farkı ölçülerinin kullanıldığı özel yöntemlerde cm düzeyine indirilebilir; anlık konum doğrulukları ise dm düzeyinde elde edilebilir. Gezen alıcının referans alıcıya uzaklığı azaldıkça GPS hata kaynaklarının her iki alıcıyı da etkileme miktarı aynı olacaktır.
Uydu Sistemleri • Referans alıcıda düzeltmeler, noktanın kesin koordinatları ve GPS sinyallerinden hesaplan anlık koordinatların farkı olarak (konum düzeltme yöntemi) hesaplanabilir. Ancak pratikte kesin koordinatlarla hesaplanan uydu-alıcı uzaklığının uydu sinyalleriyle ölçülen uzaklıktan farkı (gözlem düzeltme yöntemi) daha yaygın olarak kullanılmaktadır. Referans istasyonunda hesaplanan düzeltmeler anında (real tıme) diğer alıcılara gönderilebileceği gibi, ölçü sonrası değerlendirme de yapılabilir. Anlık düzeltmeler, her uydu için yere kurulmuş radyo vericisinden yayınlanarak ya da ölçüm teknesinde bir iletişim uydusu yoluyla yapılır. Böylece teknenin yeri hesaplanmadan önce gözlenen uzunluklar düzeltilmiş olur.
Uydu Sistemleri • DGPS’nin özellikle deniz ve havacılıkta kullanımı başka sorunları da beraberinde getirmiştir. Çünkü uçak ve gemilerin sabit istasyondan çok uzaklara gitmesi söz konusudur. Bu durumda ise DGPS’nin temel ilkesi ortadan kalkmaktadır. Dolayısıyla sabit istasyondan uzaklaştıkça doğruluk da o oranda azalacaktır. • GPS ölçümleri için en az iki alıcı gereklidir, ama sık kullanılan tekniklerde bilinen yerlerde üç, bilinmeyen yerlerde de dördüncü alıcı kullanılır. 10 km de 10 mm'lik ve 100 km'de 10 cm'lik doğruluklara ulaşılabilir. Elde edilen doğruluklar, alıcıdan görüldüğü kadarıyla uyduların geometrisine bağlıdır. Uydular sürekli biçimde yörüngelerinde hareket ederler ve dört uydu bir hat üzerinde ya da ufka yakın bir yerde dağılmış ise doğruluk azalır.
Transit Doppler Alıcıları İle Nokta Konumlama Yöntemi Amerika Birleşik Devletleri uydu sistemi olan Transit, uzak yerlerdeki noktaların koordinatlarının tutarlı bir doğrulukla belirlenmesini sağlamıştır. Yedi uydu iki sabit frekanstan yayın yapabilir. Doppler kaydırmasının miktarı, uydunun uzaydaki konumundan elde edilen bir konum çizgisi verir ve bunların birkaçı kesişerek alıcının üç boyutlu koordinatlarını verir. Uydular, dünya etrafındaki kutupsal yörüngede, sürekli olarak dönmektedir. Bunların yörüngesel peryodları, 1 saat 47 dakika kadardır. Yükseklikleri ise dünya yüzeyinden yaklaşık 1000 km kadardır. Doppler sayımları, alıcının tipine göre 2 dakikadan 5 saniyeye kadar değişiklik gösteren aralıklarla yapılır. Her doppler sayımı, yukarıda anlatıldığı gibi sabit bir ölçümü temsil eder. Böylece, aralık kısaldıkça tek bir geçişten daha çok ölçüm elde edilebilir ve teoride daha doğru bir sabitleme sağlanmış olur.
Uydu Sistemleri • Uydudan elde edilen sonuçların dik koordinat sistemi üzerinde (WGS 84) enlem, boylam ve yüksekliğe dönüştürülmesi için sistem, yerküre ve deniz yüzeyi arasında bir ilişki olmalıdır. WGS 84’ün yüksekliği hidrografik ölçmeler için uygun olmayabilir. Çünkü bu değer, deniz haritası başlangıç seviyesi (datum) değerinden onlarca metre farklı olabilir. • Uydu, yerel ufkun üzerinde olduğunda, gerekli geçiş ölçümlerini yapmak mümkün olur. Uydu ortalama 35-100 dakikada ortaya çıkar (boylama bağlı olarak) ve 12-16 dakika kalır. 10 metreye kadar doğruluğu olan konumlama için, 30 iyi kaliteli geçiş alabilen sabit bir alıcı gereklidir. Daha iyi sonuçlar, bilinen bir noktaya konan ikinci bir alıcı ile sağlanabilir. Bu hatalar, uydudan, pozisyondan ve verinin gönderilmesinden kaynaklanabilir.
Akustik Sistemler • Elektromagnetik sistemlerin doğrulukları ya da yolları belirli bir iş için yeterli olmadığında ya da bu işin deniz yatağında kesin mühendislik ölçümü gerektirdiğinde, ölçmecinin bu gereksinimini karşılamak için değişik yollara başvurması gerekir. Birinci gereksinim için elektromagnetik konum belirleme (EPF - electromagnetic position fixing) sistemi değiştirilir. - Sualtı konum belirleme (UPF - underwater position fixing) sisteminin kullanımıhavaya göre sınırlıdır. Mühendislik ölçmeleri için, Sualtı konum belirleme (UPF) sistemi birçok durumda en iyisidir.
Akustik Sistemler Kıyı ötesi mühendislik ölçmeleri örnekleri petrol endüstrisi çalışmalarında bolca bulunabilir. Bunlar, matkap donanımları ve üretim platformları için • Yer ölçümlerini, • Platformların önceden belirlenmiş konumuna yerleştirilmesini • Boru hatlarının kaynağa bağlanmasını, • Boru hatlarının ve diğer yapıların erozyona karşı denetlenmesini • Ve daha birçok şeyi kapsar. Bu işlerin hassas bir biçimde yürümesi için sensörlerin (echo sounderlar, sonarlar, TV kameraları, vb.) fazla uzakta olmaması gerekir. Ve bunlar yedek parçalar şeklinde, uzaktan kumandalı araçlar (ROV - remote-operated vehicle) ve sualtında kalabilir araçlarla uzağa taşınabilirler. ROV’lar isminden de anlaşılabileceği gibi insansızdır. Ancak sualtında kalabilenlerde insan bulunur. Bunların her biri bir kordonla yüzeydeki gemiye bağlanabilir ya da serbestçe yüzebilir. ROV’lar genellikle tekneye bağlanır; mürettebatlı olanlar, denizaltında kalabilir ve serbestçe yüzebilirler.
Akustik Sistemler Long Baseline Method (LBL) – Uzun Bazlı Yöntem LBL, ölçme teknesinden denizaltı sensörüne veya hareketli hedefe, sualtında koordinatları bilinen 3 ya da daha fazlatransponderdan geniş bir alanda hassas konumlama sağlamaktadır. Baz uzunlukları 50 m ile 6 km arasında deniz derinliğine, sualtı topografyasına, akustik frekansa ve ortam koşullarına bağlı olarak değişmektedir. Transponderlar gemi altındaki transducer yardımıyla sorgulanır.
Akustik Sistemler Short Baseline (SBL) Method - Kısa Bazlı Yöntem SBL yöntemi, sualtı tabanındaki transponderlar arasında yer alan uzun bazlar yerine geminin omurgasındaki referans noktaları arasındaki bazları kullanmaktadır. Burada koordinat sistemi sualtı tabanı yerine gemiye bağlıdır.
Akustik Sistemler Ultra or Super Short Baseline (USBL - SSBL) Method Çok Kısa Bazlı Yöntem SBL sistemlerinden farklı olarak geminin omurgasında transducer dizilerinden oluşan tek bir sistem bulunmaktadır. Akustik sinyalin yatay ve düşey düzlemlerdeki geliş açısını ölçmek için faz karşılaştırma teknikleri kullanılmaktadır. Bunun yanında deniz tabanında tek bir şamandıra yerleştirilmiştir.
Akustik Sistemler Birleşik Sistemler
Akustik Sistemler Uzun bazlı konfigürasyon (LBL) Gemi, ROV ya da su altında kalabilenler S in yerini belirlemek amacıyla SA, SB, SC, SD kenarlarını oluşturmak için tras- ponder işaret şamandırasını sorgular. Kısa bazlı konfigürasyon (SBL) Baz doğrultuları olan X ve Y eksenleri teknenin başından kıçına (X) ve alaban- dadan alabandaya (Y) yerleştirilen su altı dinleme cihazı (hydrophone) ile tanımlanırlar Sorgulama transdüseri
Akustik Sistemler Her durumda, sualtı alıcılarının yerlerinin her zaman bilinmesi gerekir. Aynı şekilde bu durum, matkap (sondaj) kordonu için de geçerlidir. Sondaj kordonunun bir ucu sondaj deliğine, diğer ucu sondaj mavnasına bağlıdır. UPF sistemlerinin üç biçimi vardır. Uzun Bazlı (Long Baseline - LBL), Kısa Bazlı (Short Baseline - SBL) ve Süper Kısa Bazlı (Süpershort (ultrashort) Baseline - SSBL). Çok kısa bazlı konfigürasyon Teknenin yeri deniz yatağı işaret şamandırasından gelen 3 ya da 4hidrofonun faz farkıyla belirlenir Tekil deniz yatağı transponder (radyo sinyaline cevap veren radyo vericisi) ya da pinger. Taşınabilir su altı dinleme cihazı yerleştirimi (SBL için eksenler) Sualtı konumlama sistemlerinin Konfigürasyonu
Akustik Sistemler Sualtı Akustik Fenerler (Underwater acoustic beacons) Fenerler (beacons), pasif, aktif ya da kumandalı olabilir. Silindirik ya da küresel basınç levhalarının boyutları 0.3 ile 1 m arasındadır ve deniz yatağının üzerine yakın demirlenmiş (şamandıraya bağlanmış) olabilir. Sinyallerin, çevrenin topografyasından etkilenmemesi için düz alanlar tercih edilir. Akustik yayıncılar, özel bir kodla tetiklenir ve birimleri yüzeye çıkarmak için kullanılır. Olta kurşunu ya da başka bir ağırlıkla denize bırakılır ve birimin etrafına takılan, batmayan bir halka, birimin geri getirilmesini sağlar. Trol avı yapılan alanlarda fenere dik açı verilirken av yapılmayan alanlarda (düşük profil vermek için) düşey olarak sabitlenir. Aktif fenerin en basit biçimi 1 Hz değerinde kodlanmış, kısa pulslar gönderir. Batarya bir yıl dayanır.
Akustik Sistemler • Radyo alıcısı fenerler (transponder beacons), en kullanışlı olanlarıdır. Deniz tabanına demirlenmiş gibi yerleştirilenler, yüzeydeki gemiden kodlanmış bir sorgulama pulsu gelinceye kadar pasif moddadır. Kod, klasik bir puls zinciri olabileceği gibi, transponderin hidrofonunun “dinlediği” belirli bir sinyal frekansı olabilir. Transponderin sorgulama pulsunu alınca kendi cevabını iletir ve bir dahaki sorgulamaya kadar tekrar pasif hale döner. İletim frekansı genellikle soru frekansından farklıdır. Daha karmaşık transponderlerde mekanik ya da tetikleme (pyrotechnic) yayım aleti bulunur: Bu alet, yüzeydeki gemiden gelen özel bir komut pulsuyla harekete geçer. Bu komutun alınmasıyla fenerlerin bağı çözülür ve fener kendi pozitif kaldırma gücüyle su yüzeyine yükselir.
Akustik Sistemler • Cevap veren fenerler (responder beacons), kendilerini yüzeydeki gemiye bağlayan bir kablo yoluyla elektriksel olarak harekete geçerler ve transponder gibi işlev görürler. Pulsların seyir süresi rotanın tek yönlü yolunu temsil eder. • Yardımcı fenerler (relay beacons), bir ağdaki tüm sorgulama frekanslarından ayrı bir sorgulama frekansına sahip transponderlerdir ve uzaktan sorgulamayı gerektiren yerlerde kullanılabilirler (Örneğin, gemiden aldığı bilgiyi değiştirecek kendi sorgulama sinyallerini yapması için kontrol edilen bir sualtı aracında olduğu gibi). • Akıllı transponderler (Intelligent transponders), geniş bir alanda kullanılmaktadır. Mikro işlemcilerle donatılmış olan bu transponderler, özel komutlar verilerek ağdaki diğer fenerlere soru sorulmasını sağlar ve elde edilen verileri kontrol gemisine gönderirler. Bunlar, hız hesabı için sıcaklık ve tuzluluk ölçümü yapabilecek biçimde tasarlanmıştır. Ayrıca LBL‘deki anahatların uzunluğunu hesaplar ve bağlı oldukları ya da iletişim kurabildikleri araçları da harekete geçirirler.
Akustik Sistemler • Uzun Baz (LBL) • LBL, su altı işaret şamandırasının (beacons) yerinin belirlenmesinin klasik biçimidir. Yüzeydeki tekneyi -ya da ROV, su altında kalabilenler ve çekilen parçaları- yerel trilaterasyon ağına bağlar. Bu ağda baz doğrultusu boyunca, kilometrede 1 m lik doğrulukta seyir yapmak mümkündür. En iyi doğruluk 2 m civarındadır. Baz uzunlukları her 100 m lik su derinliği için genelde 1 km dolayındadır. Ekstra durumlarda 10 km uzunluğunda olabilir (genellikle 2-3 km).
Akustik Sistemler • Bu tip bir ağın kalibrasyonunun yapılması, deniz ölçümü işinin ortalama değer bulmak için sürekli gözlem yapan, en küçük karelere göre işaret şamandırasının en uygun yerini belirleyen, ülke ölçme sistemine en benzer olanıdır. Yüzeydeki tekne, deniz yatağı ağı ile GPS ya da EPF sistemi gibi yüzey belirleme sistemi arasında bir bağ görevi yapar. Belli bir zaman süresince yüzey sistemi, tekrar tekrar sabit deniz yatağı işaret şamandıralarına bağlanırlar. Bu durum, tamamı sağlanıncaya kadar devam eder. Deniz yatagı ağları, üçgen ve dörtgenlerden oluşan zincirler şeklinde sıralanırlar ve bunlar istenen alanın iyi geometri sabitleri ile kapsanması için gerekli oranda genişletilir. Bu aynen (geleneksel) klasik sahil ağlarına benzer
Akustik Sistemler Su altında kalabilenlerin izlenmesi Düzenleyici (relay) radyo alıcıları (transponder) su altında kalabilenler kapsamında olduklarından özel frekans üzerinde sorgulanırlar; böylece transponderlerin cevap vermesi sağlanır ve su altında kalabilenlerin konumu hem kendi bünyelerinde hem de yüzeydeki teknede hesaplanabilir. Uzaktan idare edilen araçların (ROV) izlenmesi Yüzeydeki tekne deniz yatağı düzenini sorgular ve ROV transponderini sıra ile tetikler; cevap verici (responder) normal sorgulama frekansında gönderme yapar. Hem yüzey teknesinin hem de ROV un yerleri belirlenir.
Akustik Sistemler Yedekte çekilen araçların izlenmesi Transponder cevapları yüzeydeki tekne tarafından direkt alınır ve yedeklenen araçlardan göbeğe ait kablolar yolu ile cevaplar alınır ve iki konumun da belirlenmesi sağlanır. Kaynağın yeniden yerleştirilmesi Vinç, kaynak üzerinde konumlandırılır ve bırakılma anında yerleştirilen transponderler kullanılır. Sarkıtma şeridinin sonuna yerleştirilen hidrofonla doğru yeniden yerleştirme yapılır.
Akustik Sistemler • Boru hattı bağlanması Boru hattındaki transponderler doğrudan sorgulanırlar. Daha sonra deniz yatağı düzenleyici işaret şamandıraları tarafından da boru hattının transponderlerinin yerinin belirlenmesi için sorgulanırlar.
Akustik Sistemler Bütün Sualtı Konumlama sistemleri (UPF) otomatikleştirilmiştir. Deniz yatağı işaret şamandırası, yüzeydeki tekneden gelen frekans göndermeleri ile sorgulanırlar ve her işaret şamandırası kendi kimliğinin frekansından cevap verir. Kenarlar, akustik sinyallerin iki yol gidip gelmeleri sürelerinden elde edilir. Gemide bulunan birim, sorgulama oranını denetler, dipten ve yüzey yansımalarından kaynaklanan çok yönlü sinyalleri elimine etmek için süzgeç görevi yapar.
Akustik Sistemler • Konfigürasyon (LBL), bir alanın geniş bir bölümünde yapılacak yakın ölçüm için idealdir. Bu alan, üretim platformu alanı gibi genişlik konusunda kısıtlanmıştır. Aynı şekilde bağımsız olarak su altında kalabilenlerin ölçümü için de idealdir. (Burada su altında kalabilenlerin mürettebatı sorgulama devirini denetleyebilir ve seyir verilerini işleyebilir.) Ağ içinde yedekleme yapılmış parçaların ve ROV ların izleri için yapılan ölçümlerde kullanılırlar. SBL ve SSBL şekillerinden daha çok alanları kapsayabilir. Ancak doğaldır ki ağın oluşturulması ve kalibrasyonu daha karışıktır.
Akustik Sistemler • LBL ağlarının kalibrasyonu değişik biçimlerde yapılabilir. Ağın şeklinin ve ölçeğinin düzeltilmesi için her zaman yerel bir kalibrasyonu içerir. Aynı zamanda jeodezik konum ve yönlendirme için de mutlak kalibrasyona sahiptir. Sıkça kullanılan yöntemler aşağıdaki şekilde görülmektedir. Bu sistemler, yüzey konumlama verilerinin mutlak konumu ve yönlendirilmesine dayandıklarından, kurumlar tarafından kolayca entegre sistemlerine dönüştürülürler.
Akustik Sistemler Baz doğrultusunun kesişmesi Baz hattı işaret şamandıraları çiftler halinde, baz hattı uzunluğunu elde etmek üzere sorgulanırlar. Yerel gridlere ayarlanan (datum), bir transpondere bağlıdır. Bu doğru yerelleştirme ve daha sonra yapılacak yöneltme için gereklidir. Dizi yönlendirmesi Yönlendirme, jiroskoplu pusula başlığıyla, akustik sabitlerden hesaplanan başlığın karşılaştırılması sonucunda hesaplanır. Rüzgar, gel-git, dalga yüzünden oluşan engellerin telafi edilmesi için ters yönde de yapılır.
Akustik Sistemler Yonca yaprak kalibrasyonu Tekne, diziyle birlikte ve onun çevresinde seyreder, yüzey PF sistemi ile belirlenir, kenar uzunluklarından yararlanılarak transponder konumu belirlenir. Dairesel Kalibrasyon Transponderler, yonca yaprağı yönteminde olduğu gibi coğrafi olarak konumlandırılırlar. Bu konumlandırmada diğer sistemlerce belirlenen tekne konumlarından transpondere kadar olan kenar ölçümlerinden hesaplanır.
Akustik Sistemler SATNAV kalibrasyonu Tekne, üç konumda demir atar, kenar verileri ve uydudan belirlenen konumlamadan transponderlerin coğrafi konumlarını belirler. Statik kalibrasyon Sabit platformlar için, her transponder normal modda ya da relay modda çalışır. Baz hattı uzunlukları doğrudan ve tekrarlı kenar ölçümlerinden hesaplanır.
Akustik Sistemler Akıllı transponderlerin kendiliğinden kalibrasyonu Özel bir komut, transponderlerin kendiliğinden kalibrasyon yapma modunu benimsemelerini sağlar. Bunun mikro işlemcisi, uzunluk birimleri (rangig unit) gibi çalışırlar, diğer transponderleri sorgularlar ve baz hattı uzunluğunu uzaktan ölçerek yüzeydeki tekneye bildirirler. Dizi yerleştirilmesi (array relocation) ve yönlendirme Akustik diziden elde edilen konum sabitleri, yüzey PF sistemiyle elde edilen sabitlerle karşılaştırılır. Dizi konumu ve yönlendirmesi oluşturuluncaya kadar ayarlanır.
Akustik Sistemler Kısa Bazlı Konfigürasyon (SBL)
Akustik Sistemler SBL sistemleri, datum işaret şamandıralarının yakın yarıçapları ile çalışmaya uygundurlar. Örneğin, suyun derinliğine hemen hemen eşit bir yarıçapla. Diğer yandan “datum” işaret şamandırası izlenecek parçaya takıldığında (yapıştırıldığında), su altında kalabilenlerin ya da yedeklenmiş araçların yollarının izlenmesinde de kullanılırlar. Sık kullanılan bir başka uygulama; tekne deniz yatağındaki ilgilenilen noktanın düşey olarak tam üzerinde durmak için olduğu yerde manevralar yapar. Buna benzer olarak sondaj deliği üzerinde kendiliğinden hareket eden (gücünü kendisinden alan) sondaj kayığı (filika, mavna) verilebilir. Bu işleme dinamik konumlama DP adı verilir.
Akustik Sistemler Eğer, tekne transponder (radyo alıcısı) nın doğrudan üstünde bir yerinde durursa ve iki deniz altı dinleme cihazı, A ve B aralarındaki maksimum baz hattı uzunluğunu verecek şekilde konulmuşsa, transponderden A ve B ye giden ışın yolları eşit olur. Böylece transponder sinyalleri eşit safhalarda her iki su altı dinleme cihazına ulaşırlar. Bu anda, gemi yerinden uzaklaşırsa, A ve B deki sinyal safhaları farklı olur. Bunun sebebi alınan yoldaki farktır. Bu farkın miktarı, geminin “on - top” konumundan olan uzaklığına bağlıdır. Bu yöntemi kullanan tekneye genellikle yay itici pervane ve ona ek olarak itici (hareket ettirici) ünite yerleştirilir. Faz farkı sinyali itici kuvvet ünitelerini harekete geçirir. Bunlar, teknenin yeniden sıfır noktasına dönmesi için gereklidir
Akustik Sistemler Baştan kıça (gemi boyunca) tek bir işaret şamandırasının konum belirleme geometrisi
Akustik Sistemler • Dinamik konumlamanın ilkeleri yüzeydeki teknenin alt kısmına yerleştirilmesinde kullanılabilir. Şekilden de anlaşılacağı üzere, teknenin transpondere bağlı olarak yerinini saptanabilmesi için, yalnızca BC baz hattının uzunluğunun ve transponderin yerinin bilinmesi gerekir. BC nin uzunluğu, AC sin ile belirlenir. AC nin uzunluğu da, transponderden yapılan gönderme ile su altı dinleme cihazı tarafından bunun alınması arasında oluşan aralığın zaman ayarı yapılarak elde edilir. Ancak bu işlem eğer sorgulama zamanı da biliniyorsa yapılabilir. Bununla birlikte transponderin gönderme yapmadan önceki dahili gecikmesinin de bilinmesi gerekir. Aslında basit bir işaret şamandırası transponderin yerine geçebilir. Eğer kenar uzunlukları farkları (R) ölçülebiliyorsa, sorgulama ihtiyacı ortadan kalkabilir. Toplam uzunluk yerine R nin ölçülmesi gerekir.