Download
1 / 29
300 likes | 504 Views
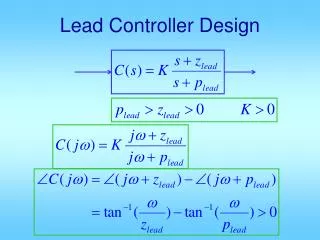
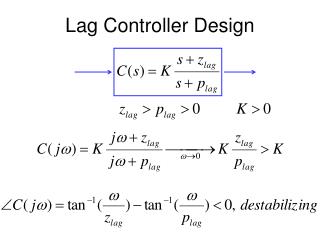
Lag controller design. It has “destabilizing” effect (lag) Not used for improving M P , t r , … Use it to improve e ss Use it when R.L. of G ( s ) go through the desired region but e ss is too large. Design steps. From specs, draw desired pole region

E N D
Lag controller design • It has “destabilizing” effect (lag) • Not used for improving MP, tr, … • Use it to improve ess • Use it when R.L. of G(s) go through the desired region but ess is too large.
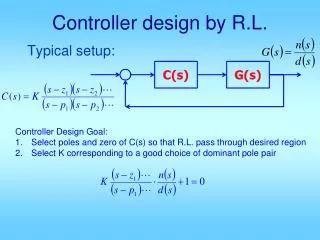
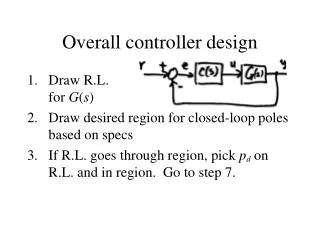
Design steps • From specs, draw desired pole region • Draw R.L. for G(s). (it goes through ) • Select pd on R.L. & in region • Get • With that K, compute error constant(Kp, Kv, Ka) from KG(s) (call it Kva) • From specs, compute Kvd
If Kva > Kvd , doneelse: pick • Re-compute • Closed-loop simulation & tuning as necessary
Example: Want: Solution:
Draw R.L. • Pick pd on R.L. & in Region pick pd = – 0.35 + j0.5 • Since there is one in G(s)
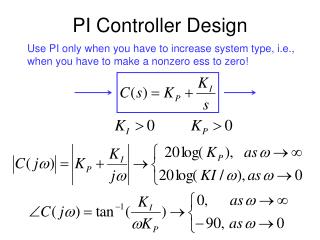
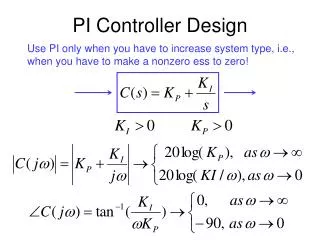
Lag control can improve ess, but cannot eliminate ess • Use PI control to eliminate ess • PI :
Only advantage of PI: remove ess • It has destabilizing effect May ↑ MP , ↑ts , etc. • “Sluggish” settling, just like Lag • Needs trial and error tuning of Kp and KI
Second design: • Draw R.L. for G(s) • From specs, draw desired region • Pick pd on R.L. & in region • i. Chooseii. Choose • Simulate & tune
Example: Want: Solution: Draw R.L.
Clearly, R.L. pass through desired region. Pick (right on boundary) Choose
Step response: ess = 0 No MP (no overshoot) fast rise to 0.85, then very sluggish to 1 Tune 1: KP↑ to 2.5 KP
None unique solution • Design is a creative process based on science
Example: Want:
Sol: G(s) is type 1Since we want finite ess to unit acc, we need the compensated system to be type 2C(s) needs to have in it
Draw R.L., it passes through the desired region. Pick pd on R.L. & in Region pick pd = – 180 + j160 Now choose z to meet Ka:
Pick z = 0.03 Do step resp. of closed-loop: Is it good enough?