Download
1 / 1
10 likes | 163 Views
Andrew Niedert , Richard Hill, and Nassif Rayess University of Detroit Mercy, Department of Mechanical Engineering. Control Algorithm and Software . Abstract. Multi-Body Dynamic Simulation .

E N D
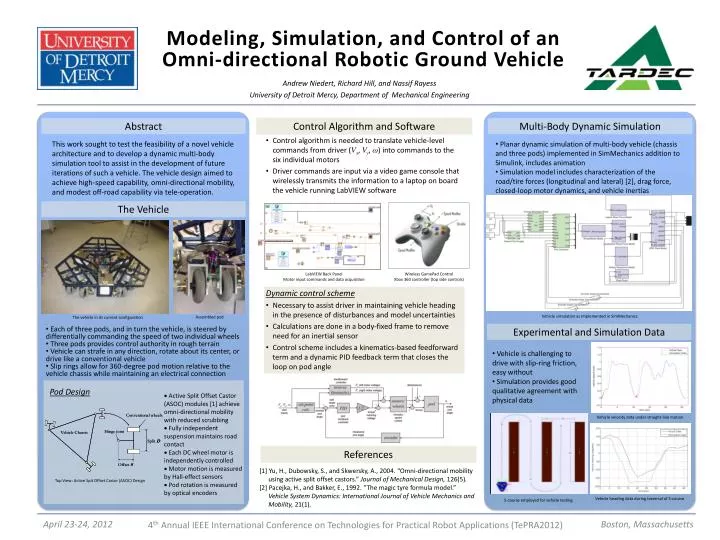
AndrewNiedert, Richard Hill, and NassifRayess University of Detroit Mercy, Department of Mechanical Engineering Control Algorithm and Software Abstract Multi-Body Dynamic Simulation • Control algorithm is needed to translate vehicle-level commands from driver (Vx, Vy, ω) into commands to the six individual motors • Driver commands are input via a video game console that wirelessly transmits the information to a laptop on board the vehicle running LabVIEW software • This work sought to test the feasibility of a novel vehicle architecture and to develop a dynamic multi-body simulation tool to assist in the development of future iterations of such a vehicle. The vehicle design aimed to achieve high-speed capability, omni-directional mobility, and modest off-road capability via tele-operation. • Planardynamic simulation of multi-body vehicle (chassis and three pods) implemented in SimMechanics addition to Simulink, includes animation • Simulation model includes characterization of the road/tire forces (longitudinal and lateral) [2], drag force, closed-loop motor dynamics, and vehicle inertias The Vehicle LabVIEW Back Panel Motor input commands and data acquisition Wireless GamePad Control Xbox 360 controller (top side controls) • Dynamic control scheme • Necessary to assist driver in maintaining vehicle heading in the presence of disturbances and model uncertainties • Calculations are done in a body-fixed frame to remove need for an inertial sensor • Control scheme includes a kinematics-based feedforward term and a dynamic PID feedback term that closes the loop on pod angle Vehicle simulation as implemented in SimMechanics Assembled pod The vehicle in its current configuration • Each of three pods, and in turn the vehicle, is steered by differentially commanding the speed of two individual wheels • Three pods provides control authority in rough terrain • Vehicle can strafe in any direction, rotate about its center, or drive like a conventional vehicle • Slip rings allow for 360-degree pod motion relative to the vehicle chassis while maintaining an electrical connection Experimental and Simulation Data • Vehicle is challenging to drive with slip-ring friction, easy without • Simulation provides good qualitative agreement with physical data Pod Design • Active Split Offset Castor (ASOC) modules[1] achieve omni-directional mobility with reduced scrubbing • Fully independent suspension maintains road contact • Each DC wheel motor is independently controlled • Motor motion is measured by Hall-effect sensors • Pod rotation is measured by optical encoders Vehicle velocity data under straight-line motion References [1] Yu, H., Dubowsky, S., and Skwersky, A., 2004. “Omni-directional mobility using active split offset castors.” Journal of Mechanical Design, 126(5). [2] Pacejka, H., and Bakker, E., 1992. “The magic tyre formula model.” Vehicle System Dynamics: International Journal of Vehicle Mechanics and Mobility, 21(1). Top View: Active Spit Offset Castor (ASOC) Design Vehicle heading data during traversal of S-course S-course employed for vehicle testing 4th Annual IEEE International Conference on Technologies for Practical Robot Applications (TePRA2012)