Download
1 / 78
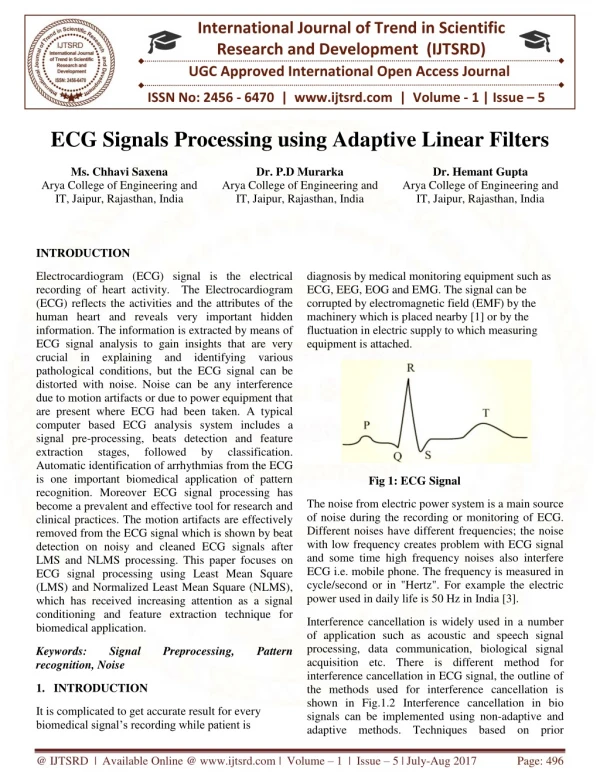
780 likes | 800 Views
Explore the exciting world of image processing and robotic vision through signal synthesis and analysis techniques. Learn to filter, enhance, and recognize patterns in signals, as well as correct errors and restore data. Discover how Fourier transforms and inverse functions play a crucial role in image enhancement and noise removal. Dive into the world of data compression and signal approximation for efficient processing.

E N D
ASU MAT 591Image Processing Scienceand Robotic VisionRod PickensPrincipal Research EngineerLockheed Martin, Incorporated
Signals and Processing • Signals • Analog and discrete signals • Dimensionality of signals • 1-D signals • Sounds (temporal), echocardiogram, seismic signal • 2-D signals (this presentation) • Images (spatial) • 3-D signals • Video sequences of images (spatial and temporal) • Signal processing • Synthesize and analyze signals • Filter signals using low-pass, band-pass, and high-pass filter • Modify signals such as warp, delay, stretch, rotate, shrink, … • Restore and enhance signals • Recognize patterns and detect signals
Signal Processing: Now Animal Robotic Touch Touch Vision Vision Taste Taste Hearing Hearing Smell Smell
Fourier Synthesis White Light In White Light Out Fourier Analysis Inverse Functions Analysis and Synthesis of Light
Derivative Inv Fourier Trans Inv Radon Trans Warp Correction Integral Fourier Transform Radon Transform Warp Data Inverse Functions
Filtering White Light In Filtering removes all but red colors Red Light Out
Television Television Stations 3, 5, 6, 13, 15, … Television Filtering removes all but Channel 6 Channel 6
Television Television Stations 3, 5, 6, 13, 15, … Television Filtering removes all but Channel 15 Channel 15
Radio Radio Stations Radio Stations 91.5, 96.9, 100.7 Radio Station 100.7 Filtering removes all but Station 100.7
Radio Radio Stations Radio Stations 91.5, 96.9, 100.7 Radio Station 96.9 Filtering removes all but Station 96.9
Vision Scene of a Room: walls, books, desks, chairs, windows,… Robot vision Book Filtering removes all but a book
Vision Scene of a Room: walls, books, desks, chairs, windows,… Scene of a Room Robot vision Table Filtering removes all but a table
Synthesis All Room Contents Descriptor of scene is D(w) Scene of a Room Graphics to build a scene
Signal Approximation of Signal Filter that eliminates less important data. Data compression
Data compression goal Signal Approximation of Signal Filter that eliminates less important data.
Correct Errors Preprocess Restore Communications Normalize Remove Noise Remove Distortions Remove Sensor Effects Recognize Analyze Decompose Signals Label Signals The Example Architecture Format Format Correct Errors Preprocess Restore Data Recognize Analyze Descriptions Will Discuss in more detail!
Preprocess Format Correct Errors Preprocess Preprocess Restore Data Normalize Remove Noise Remove Distortions Analyze Recognize Descriptions
Fourier Analysis Clearer Output Image Noisy Input Image Fourier Synthesis Fourier Based Noise Filtering Mostly Noise so is Zeroed Mostly Signal Fourier Transform and Filter the Noise From Jason Plumb at http://noisybox.net/weblog/
Filtering and Enhancing Data Math to follow From Mathworks homepage at http://www.mathworks.com/
Filtering: Analysis Image Analysis
Filtering: Removing Noise Image Filtering: removes noise
Filtering: Synthesis Synthesis Image Enhanced
Image Enhanced Filtering: removes noise Filtering Synthesis Analysis
I2 = m*I1 I2 p(I1) p(I2) I1 I1 I2 Input Image Intensity Histogram Enhance (stretch) Using Linear Mapping Output Image Intensity Histogram (more contrast) I=Intensity Enhancing the Data: Linear map
Warping data Suppose we have unwanted camera motion. From Mathworks homepage at http://www.mathworks.com/
Warping data We can correct motion errors if we know motion model. From Mathworks homepage at http://www.mathworks.com/
Warping data From Mathworks homepage at http://www.mathworks.com/
Warping Correction is an Inverse Function Warping Correction Warping
y1 x1 y2 x2 Linear Algebra to Flip
y1 y2 y2=y1 x1 y1 x2 y2 x1 x2=- x1 x2 Linear Algebra to Flip
y2 y2 x2 x2 Linear Algebra to Flip y1 I(x1,y1) y2 y2=y1 x1 y1 x2 x1 x2=- x1
y2 y2 y2 x2 x2 x2 Linear Algebra to Flip y1 I(x1,y1) y2 y2=y1 x1 y1 x2 x1 x2=- x1 I(x2,y2)
Linear Algebra to Flip y1 I(x1,y1) y2 y2=y1 x1 y1 x2 y2 y2 y2 y2 x1 x2=- x1 x2 x2 x2 x2 I(x2,y2)=I(f(x1),g(y1))
Linear Algebra to Flip y1 y1 y1=y2 x1 y2 x1 y2 x2 x1=- x2 x2 I(x2,y2)
Linear Algebra to Flip y1 I(f-1(x2), g-1(y2)) y1 y1=y2 x1 y2 x1 y2 x2 x1=- x2 x2 I(x2,y2)
Linear Algebra to Flip y1 I(x1,y1)=I(f-1(x2), g-1(y2)) y2 y2=y1 x1 y1 x2 y2 x1 x2=- x1 x2 I(x2,y2)
Linear Algebra to Flip and Shrink y1 x1 y2 x2
Linear Algebra to Flip and Shrink y1 y2 y2 = -0.5 * y1 x1 y1 x2 y2 x2 = 0.5 * x1 x1 x2
Ifwe can determine f(), g(), f-1(), and g-1(),thenwe can correct camera motion! Correcting warped data (camera motion) From Mathworks homepage at http://www.mathworks.com/
Restoration Format Correct Errors Preprocess Restore Restore Data Remove Sensor Effects Recognize Analyze Descriptions
Restoring data for smear, optics,… From Mathworks homepage at http://www.mathworks.com/ Smear and optics can be viewed as filters that can degrade an image! Uses Linear Systems Theory Next
Restoration Restoring data for smear, optics,… From Mathworks homepage at http://www.mathworks.com/ Uses Linear Systems Theory Next
Restoration: Analysis Image Analysis
Filtering: Removing Smear Image Smr-1(wx,wy) is a filter that removes smear or restores the original object.
Object Filtering Smear inverted as a filter Image Image Restored to best look like original Object
Restoring data for smear, optics,… From Mathworks homepage at http://www.mathworks.com/ Uses Linear Systems Theory Image(wx,wy) Next
Restoring data for smear, optics,… From Mathworks homepage at http://www.mathworks.com/ Smr(wx,wy)*Image(wx,wy) Uses Linear Systems Theory Image(wx,wy) Next