Download

1 / 67
690 likes | 1.37k Views
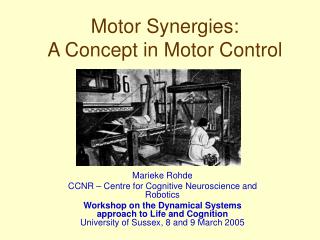
Reluktančný synchrónny motor (RSM, SynRM ). Reálny SynRM : p ôvodný rotor ( vľavo ) , stator ( v strede ) , nový rotor ( vpravo ). Niečo na úvod o RSM.

E N D
Reluktančný synchrónny motor(RSM, SynRM) Reálny SynRM: pôvodný rotor (vľavo), stator (v strede), nový rotor (vpravo).
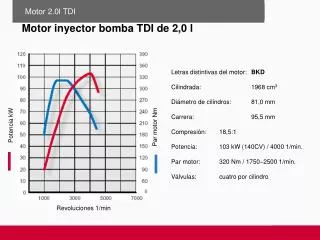
Niečo na úvod o RSM RSM je trojfázový elektrický motor s magneticky anizotropnou rotorovou štruktúrou, čo v praxi znamená, že rotor má v jednotlivých osiach rozdielnu magnetickú vodivosť, čím sa vytvárajú na rotore póly. Dobrá magnetická vodivosť znamená vysokú indukčnosť (d) a naopak zlá magnetická vodivosť znamená malú indukčnosť (q). RSM je elektrický stroj s vyjadrenými pólmi na rotore, ale v porovnaní s klasickým synchrónnym motorom nemá na rotore budenie. Na premenu elektrickej energie na mechanickú využíva princíp reluktančného momentu, ktorý je úmerný rozdielu synchrónnych indukčností v d- a q- osi. V ustálenom stave sa točí synchrónnymi otáčkami, ktoré sú dané frekvenciou napájacej siete (frekvenciou meniča) a počtom pólových dvojíc: Ilustračný obr. rotora RSM s bariérami V porovnaní s ASM dosahuje horšie hodnoty účinníka, ale vďaka moderným konštrukciám rotora a zvládnutiu vektorového riadenia sa tento rozdiel zmazáva.
Konštrukcia RSM Stator- rovnaký ako ASM alebo SM, dutý valec, skladaný z plechov, drážkovaný po vnútornom obvode, v drážkach je uložené rozložené trojfázové vinutie napájané trojfázovou sústavou súmerných napätí. Stator RSM nemá vyjadrené póly Rotor- má vyjadrené póly- má rozdielnu reluktanciu v osi d a q, skladaný z plechov, nemá budenie Podľa spôsobu skladania (vrstvenia) rotorových plechov delíme RSM na: Radiálne vrstvené – plech je položený v smere rádiusu a plechy sú uložené za sebou v smere osi (ako pri ASM). V prípade radiálnej konštrukcie rozlišujeme klietkové a bezklietkové. Axiálne vrstvené - plech je položený v smere osi a plechy sú na seba naukladané v smere rádiusu.
Možné konštrukčné riešenia rotora RSM Podľa spôsobu skladania plechov (vrstvenia) môžu byt RSM: a) radiálne vrstvené(a,b,c,d,e) b) axiálne vrstvené (f) Podľa toho, či je na rotore klietka: a) klietkové (a,b,c) b) bezklietkové(d,e,f)
Tu vyšetrované rotory RSM Priečny rez rotora: • pôvodného ASM • RSM vyrobeného z a)(pozri titulnú stranu rotor vľavo) • axiálne vrstveného (pozri titulnú stranu rotor vpravo) • viacbarierového RSM • jednobarierového(tu vyšetrovaného motora) b) c) a) d) e) Zdroj: HRABOVCOVÁ, V., JANOUŠEK, L., RAFAJDUS, P., LIČKO, M.: Moderné elektrické stroje, EDIS – vydavateľstvo ŽU, Žilina, 2001
Princíp tvorby reluktančného momentu Reluktancia - magnetický odpor v uzavretom magnetickom obvode • Zdroj: MOGHADDAM, R.R.: Synchronousreluctancemachine (SynRM) in variablespeeddrives (VSD) applications, thesis, Stockholm, 2011
Vyvíjaný reluktančný moment L L Charakteristika M = f (ϑL) RSM, Rs=0 Rovnica pre reluktančný moment RSM: L Zdroj: HRABOVCOVÁ, V., JANOUŠEK, L., RAFAJDUS, P., LIČKO, M.: Moderné elektrické stroje, EDIS – vydavateľstvo ŽU, Žilina, 2001
Rozbeh s klietkovým rotorom Ak má rotor RSM rozbehovú klietku, po pripojení na sieť sa rozbieha ako ASM a v oblasti synchrónnych otáčok vpadne do synchronizmu Charakteristika M = f (s) RSM (bez zohľadnenia rotorovej asymetrie) Maximálny moment RSM (ak Rs=0): Maximálny moment ASM (ak Rs =0): Zdroj: HRABOVCOVÁ, V., JANOUŠEK, L., RAFAJDUS, P., LIČKO, M.: Moderné elektrické stroje, EDIS – vydavateľstvo ŽU, Žilina, 2001
Skok RSM do synchronizmu • V blízkosti synchrónych otáčok pôsobia na rotor nasledovné momenty: • Záťažový moment Mzt • Asynchrónny urýchľujúci moment Ma, v blízkosti synchrónnych otáčok ho považujeme za lineárny • Synchrónny moment • Dynamický moment L • Úspešná synchronizácia závisí od : • Momentu záťaže Mzt • Momentu zotrvačnosti J • Počtu pólov p • Maximálneho momentu RSM Mmax • Frekvencie siete Podrobnejšie na: HRABOVCOVÁ, V., JANOUŠEK, L., RAFAJDUS, P., LIČKO, M.: Moderné elektrické stroje, EDIS – vydavateľstvo ŽU, Žilina, 2001
Asynchrónny moment v oblasti polovičných synchrónnych otáčok V dôsledku rotorovej asymetrie vykazuje točivý moment RSM počas asynchrónneho rozbehu v oblasti polovičných synchrónnych otáčok určitú anomáliu. Pod polovičnými synchrónnymi otáčkami sa vyskytuje prírastok momentu a nad polovičnými synchrónnymi otáčkami náhly úbytok momentu. Veľkosť úbytku momentu nad polovičnými synchrónnymi otáčkami závisí od veľkosti rotorovej asymetrie. V prípade veľkej záťaže sa motor nemusí rozbehnúť na synchrónne otáčky a ostane visieť na polovičných otáčkach. V prípade malej rotorovej asymetrie je tento jav zanedbateľný. Podrobnejšie na: HRABOVCOVÁ, V., JANOUŠEK, L., RAFAJDUS, P., LIČKO, M.: Moderné elektrické stroje, EDIS – vydavateľstvo ŽU, Žilina, 2001
Náhradná schéma RSM s rozbehovou klietkou nakrátko Náhradná schéma RSM s rozbehovou klietkou nakrátko v pozdĺžnom (d) a priečnom (q) smere Definuje sa sklz ako v asynchrónnom motore. V ustálenom stave sklz s=0, rotorová klietka sa neuplatní.
Náhradná schéma RSM bez rozbehovej klietky nakrátko RSM bez rozbehovej klietky je potrebné rozbiehať pomocou iného pohonného stroja, alebo frekvenčne pomocou frekvenčného meniča.
Matematický model bezklietkového RSM Napäťové rovnice statora: Rovnice spriahnutých magnetických tokov statora: Rovnica pre moment RSM: Mechanická rovnica:
Matematický model klietkového RSM Rovnica pre moment RSM: Napäťové rovnice statora: Napäťové rovnice rotora: Rovnice spriahnutých magnetických tokov statora: Mechanická rovnica: Rovnice spriahnutých magnetických tokov rotora:
Fázorový diagram RSM v ustálenom stave Rs = 0 S uvažovaním Rs ϑL – uhol medzi vektorom statorového napätia Us a osou q (záťažový uhol) φ – fázový posun medzi US a IS β – uhol medzi fázorom statorového prúdu IS a osou d Zdroj: HRABOVCOVÁ, V., JANOUŠEK, L., RAFAJDUS, P., LIČKO, M.: Moderné elektrické stroje, EDIS – vydavateľstvo ŽU, Žilina, 2001
Vplyv Rs na veľkosť a priebeh momentu L L Charakteristika M= f (ϑL) s uvažovaním Rs Rs možno zanedbať iba pri “veľkých” RSM Zdroj: HRABOVCOVÁ, V., JANOUŠEK, L., RAFAJDUS, P., LIČKO, M.: Moderné elektrické stroje, EDIS – vydavateľstvo ŽU, Žilina, 2001
Porovnanie vlastností RSM s radiálne a axiálne vrstveným rotorom – meranie naprázdno Štítkové údaje meraného motora: 400W Y/D 220/380V 3,5/2,0A nN = 1500ot/min f=50Hz IP54 Stav naprázdno : pozri titulnú stranu: rotor vľavo rotor vpravo a) b) Zdroj: HRABOVCOVÁ, V., LIČKO, M.: Reluktančný synchrónny motor, EDIS – vydavateľstvo ŽU, Žilina, 2001
Porovnanie vlastností RSM s radiálne a axiálne vrstveným rotorom – zaťaženie Štítkové údaje meraného motora: 400W Y/D 220/380V 3,5/2,0A nN = 1500ot/min f=50Hz IP54 Pri zaťažení sa porovnávajú : 1. Hodnoty výkonu pri menovitom prúde (2 A) 2. Hodnoty prúdu pre dosiahnutie menovitého výkonu (400 W) Pre dosiahnutie menovitého výkonu (400 W) potrebuje axiálne vrstvený RSM podstatne menší prúd (1,5 A), čo je dobrá správa pre menič, napájaciu sieť aj pre samotný motor. Zdroj: HRABOVCOVÁ, V., LIČKO, M.: Reluktančný synchrónny motor, EDIS – vydavateľstvo ŽU, Žilina, 2001
Porovnanie vlastností RSM s radiálne a axiálne vrstveným rotorom – zaťažovacie charakteristiky
Kvalitatívne ukazovatele RSM Maximálny reluktančný moment: Maximálny účinník : Dynamika momentu: • Veľkosť elektromagnetického momentu RSM závisí od rozdielu synchrónnych indukčností (Ld – Lq) • Maximálny účinník je priamo úmerný podielu synchrónnych indukčností (Ld/Lq) • Dynamika elektromagnetického momentu stroja úzko súvisí s hodnotou synchrónnej indukčnosti Lq (pri vhodnom type riadenia) Pomocou axiálnej konštrukcie rotora RSM sa dá dosiahnuť väčší pomer synchrónnych indukčností Ld/Lq, teda sú schopné vyvinúť väčší moment a dosahujú lepší účinník v porovnaní s radiálnym typom rotora RSM, ale problémom je absencia rozbehovej klietky.
RSM s PM – konštrukčné usporiadanie PM tvoria bariéry , μPM = μ0 Potrebný menší magnetizačný prúd zo siete, lepší účinník Rozbeh podľa toho či má alebo nemá klietku • Zdroj: MOGHADDAM, R.R.: Synchronousreluctancemachine (SynRM) in variablespeeddrives (VSD) applications, thesis, Stockholm, 2011
Vyšetrovanie parametrov RSM (prvkov náhradnej schémy) Náhradná schéma RSM s rozbehovou klietkou nakrátko v pozdĺžnom (d) a priečnom (q) smere Meraním Analytickým výpočtom MKP
Vyšetrovanie parametrov RSM meraním Odpor statora Rs – Voltampérová metóda Rozptylová indukčnosť statora Lσs: Meriame U, I a P Zdroj: HRABOVCOVÁ, V., RAFAJDUS, P., FRANKO, M., HUDÁK, P.: Meranie a modelovanie elektrických strojov
Vyšetrovanie parametrov RSM meraním Parametre rozbehovej klietky Rrd´,Rrq´, Lσrd´, Lσrq´ I Meriame U, I a P. Točíme rotorom. Zdroj: HRABOVCOVÁ, V., RAFAJDUS, P., FRANKO, M., HUDÁK, P.: Meranie a modelovanie elektrických strojov
Vyšetrovanie parametrov RSM meraním Synchrónne indukčnosti Ld a Lq sa dajú odmerať 4 metódami. Magnetizačné indukčností sa nedajú odmerať. Dajú sa dopočítať. 1. Ld - vypočítať z merania naprázdno. Lq sa dá určiť na základe fázorového diagramu pri zaťažení. Je potrebné merať záťažový uhol ϑL Zdroj: HRABOVCOVÁ, V., RAFAJDUS, P., FRANKO, M., HUDÁK, P.: Meranie a modelovanie elektrických strojov
Vyšetrovanie parametrov RSM meraním 2. Natáčaním rotora, podobne ako pri meraní parametrov rozbehovej klietky. I1 Vlastná indukčnosť: Vzájomná indukčnosť : Meriame U, I, P a indukované napätie U21. Točíme rotorom.
Vyšetrovanie parametrov RSM meraním 3. Doznievaním jednosmerného prúdu Xq získame analogicky ako Xd, len rotor treba potočiť o uhol 360/4p.
Vyšetrovanie parametrov RSM meraním 4. Sklzová metóda Rotor je poháňaný mierne nad alebo pod synchrónnou rýchlosťou. Osciloskopom meriame prúd statora. Ak Xd poznáme z merania naprázdno potom:
Vyšetrovanie parametrov RSM výpočtom Odpor statora Rs: ρϑ - merný odpor materiálu pri teplote ϑ lw - celková dĺžka vodiča vinutia Sw - prierez vodiča vinutia kR - činiteľ povrchového javu pre odpor Odpor rotora Rrd´, Rrq´ : Rovnako ako odpor statora Rr = Rty+ Rčkn Rčkn – odpor časti kruhu nakrátko
Vyšetrovanie parametrov RSM výpočtom Rozptylové indukčnosti: λ- je činiteľ magnetickej vodivosti, ktorý sa skladá z troch častí λd - je činiteľ drážkovej magnetickej vodivosti λcc - je činiteľ magnetickej vodivosti čiel vinutia λdif - je činiteľ magnetickej vodivosti diferenčného rozptylu • Pred samotným výpočtom je potrebné zistiť alebo odmerať všetky dôležité geometrické rozmery skúmaného motora. Niektoré informácie je možné získať z technickej dokumentácie motora, alebo ak nie je k dispozícii, je potrebné motor rozobrať a potrebné parametre odmerať.
Vyšetrovanie parametrov RSM výpočtom Magnetizačná indukčnosť v osi d: Magnetizačná indukčnosť v osi q: • Ds – vŕtanie statora, LFes – dĺžka statorového zväzku • N – počet závitov jednej fázy statorového vinutia • Kv1 – koeficient vinutia základnej (prvej) harmonickej • δ´ - veľkosť vzduchovej medzery, je iná v osi d a v osi q (pozri vzťahy vyššie), zohľadňuje aj Carterov činiteľ.
Určenie magnetizačných indukčností pomocou MKP Vytvoriť model v MKP Nastaviť správny magnetizačný prúd Natočiť rotor do osi d Spustiť simuláciu
Určenie magnetizačných indukčností pomocou MKP 5. Získať základnú (prvú) harmonickú magnetickej indukcie vo vzduchovej medzere Tento priebeh je pre prípad natočenia rotora v osi q
Určenie magnetizačných indukčností pomocou MKP 6. Dosadiť hodnotu amplitúdy základnej (prvej) harmonickej magnetickej indukcie vo vzduchovej medzere do vzťahu pre magnetický tok 7. Získať hodnotu indukovaného napätia ... 8. Natočiť rotor do osi q a postup opakovať
Jednoduchéporovnanie RSM a ASM ASM RSM Zdroj : katalóg RSM firmy ABB
Jednoduchéporovnanie RSM a ASM Zdroj : katalóg RSM firmy ABB
Diplomová práca Téma: Optimalizácia konštrukcie RSM Úlohy: • Analýza daného RSM a) meraním, b) analytickým výpočtom, c) MKP • Optimalizácia konštrukcie rotora z hľadiska počtu a tvaru bariér • Porovnanie RSM s pôvodným a optimalizovaným rotorom
Analýza daného RSM - meraním • Meranie odporu statora (voltamérová metóda) • Meranie naprázdno (Ld, straty naprázdno, mechanické straty ...) • Meranie rozptylovej indukčnosti statora pomocou metódy netočivej reaktancie • Meranie parametrov rozbehovej klietky (natáčaním rotora) • Meranie synchrónnych indukčností Ld a Lq(natáčaním rotora)
Analýza daného RSM - výpočtom • Pre samotným výpočtom je potrebné zistiť alebo odmerať všetky dôležité geometrické rozmery skúmaného motora. Niektoré informácie je možné získať z technickej dokumentácie motora, alebo ak nie je k dispozícii, je potrebné motor rozobrať a potrebné parametre odmerať.
Analýza daného RSM - MKP Pomocou 2D Femm sa dajú vyšetrovať magnetizačné indukčnosti Lμd a Lμq Postup pre získaniemagnetizačných indukčností: Vytvoriť 2D model Nadefinovaťvlastnostimateriálov Zarovňať rotor s magnetickýmtokomstatora Priebehindukcievovzduchovejmedzere Získať 1. harmonickúindukcievovzduchovejmedzere Výpočet Lμd Ten istýpostup pre os q
Analýza daného RSM - zhrnutie MKP sa javí ako veľmi presná metóda na určenie synchrónnych a magnetizačných indukčností RSM. Dokáže veľmi presne analyzovať magnetický obvod stroja. Preto pre optimalizáciu používam MKP s vedomím, že sa nedopúšťam veľkej chyby. V jej prospech hrá aj fakt, že pomocou ďalších aplikácii ako Matlab alebo LUA script sa dá výpočet zautomatizovať.
RSM a jeho kvalitatívne parametre • Veľkosť maximálneho elektromagnetického momentu RSM závisí od rozdielu synchrónnych indukčností (Ld – Lq), pri danom statorovom toku • Maximálny účinník je priamo úmerný podielu synchrónnych indukčností (Ld/Lq) • Dynamika elektromagnetického momentu stroja úzko súvisí hodnotou synchrónnej indukčnosti Lq (pri vhodnom type riadenia)
Ciele optimalizácie • Vo svojej práci sa snažím zistiť a dosiahnuť: • Vplyv počtu bariér na synchrónne indukčnosti Ld a Lq • Vplyv počtu bariér na pomer Ld/Lq • Vplyv počtu bariér na rozdiel Ld– Lq • Vplyv tvaru bariér na synchrónne indukčnosti Ld a Lq • Vplyv tvaru bariér na pomer Ld/Lq • Vplyv tvaru bariér na rozdiel Ld– Lq • Vytvoriť návrh konštrukcie rotora, ktorý bude mať lepšie vlastnosti ako má pôvodný RSM • Snažiť sa o to, aby nový návrh konštrukcie rotora bolo možné bez problémov vyrobiť.
Postup optimalizácie Na vyšetrovanie vplyvu počtu bariér som si vytvoril 2 modely 1. Model vychádza z konštrukcie ASM
Postup optimalizácie 2. Model vychádza z tvaru magnetických siločiar, ktoré sa uzatvárajú cez rotor, ktorý v sebe nemá žiadne bariéry ani rozbehovú klietku. (solid rotor) 1 BARIÉRA 3 BARIÉRY 5 BARIÉR
Vplyv tvaru bariér lb- je súčet hrúbok všetkých bariér, alebo aj veľkosť vzduchovej medzery v osi q, lb = lb1 + lb2 + lb3 + lb4 + lb5 lpl- je polomer rotorového plechu, zmenšený o polomer hriadeľa lpl= r pl– r hr