Download
1 / 22
220 likes | 308 Views
Limits of Disturbance Rejection using Indirect Control. Vinay Kariwala * and Sigurd Skogestad Department of Chemical Engineering NTNU, Trondheim, Norway. skoge@chemeng.ntnu.no * From Jan. 2006: Nanyang Technological University (NTU), Singapore. Outline. Motivation Objectives

E N D
Limits of Disturbance Rejection using Indirect Control Vinay Kariwala* and Sigurd Skogestad Department of Chemical Engineering NTNU, Trondheim, Norway skoge@chemeng.ntnu.no * From Jan. 2006: Nanyang Technological University (NTU), Singapore
Outline • Motivation • Objectives • Interpolation constraints • Performance limits • Comparison with direct control • Feedback + Feedforward control
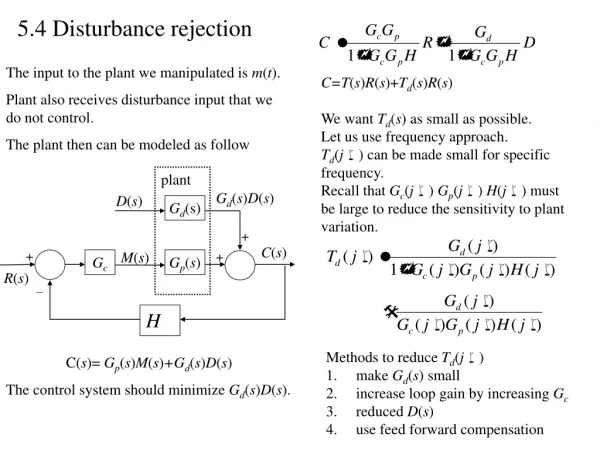
d Gd z u K G - y = z “Direct” Control Unstable (RHP) zeros αi in G limit disturbance rejection: interpolation constraint
Compositions cannot be measured or are available infrequently Problem In many practical problems, • Primary controlled variable z not available Need to consider “Indirect control”
d Gd z G Gdy u K Gy - y Indirect Control Indirect control: Control y to achieve good performance for z Primary objective paper: Derive limits on disturbance rejection for indirect control
Related work • Bounds on various closed loop functions available • S, T – Chen (2000), etc. • KSGd – Kariwala et al. (2005), etc. • Special cases of indirect control Secondary objective: Unify treatment of different closed loop functions
Main Assumptions (mostly technical) • Unstable poles of G and Gdy– also appear in Gy • All signals scalar • Unstable poles and zeros are non-repeated • G and Gdy - no common unstable poles and zeros
a • Interpolation constraints • Derivative constraints Nevanlinna-Pick Interpolation Theory Parameterizes all rational functions with Useful for characterizing achievable performance
If are unstable zeros of G If are unstable zeros of Gdy Indirect control: Interpolation Constraints Need to avoid unstable (RHP) pole-zero cancellations same as for direct control
If are unstable poles of Gy that are shared with G If are unstable poles of Gy that are shared with Gdy If are unstable poles of Gy not shared with G and Gdy - stable version (poles mirrored in LHP) More new interpolation Constraints
Reason: Derivative is also fixed Derivative Interpolation Constraint Special case: Control effort required for stabilization Bound due to interpolation constraint Very conservative: Should be:
optimal achievable performance optimal achievable performance Main results: Limit of Performance, indirect control Let v include all unstable poles and zeros: Derivative constraint neglected, Exact bound in paper
G and Gdy have no unstable poles • or has transmission zeros at these points and “Perfect” Indirect Control possible when: • G and Gdy have no unstable zeros • or Gd evaluated at these points is zero and • Gyhas no extra unstable poles
Zeros of G Direct Control vs Indirect Control • Poles of G + (Possible) derivative constraint Practical consequence: To avoid large Tzd, y and z need to be “closely correlated” if the plant is unstable
Indirect control The required change in u for stabilization may make z sensitive to disturbances Exception: Tzd(gammak) close to 0 because y and z are “closely correlated” Example case with no problem : “cascade control” In this case: z = G2 y, so a and y are closely correlated. Get Gd = G2 Gdy and G = G2 Gy, and we find that the above bound is zero
Direct Indirect Case Stable system 0.5 0.5 Unstable system 1.5 15.35 Extra unstable pole of Gy - 51.95 Simple Example
d M Gd z G K2 Gdy u K1 Gy - y Feedback + Feedforward Control Disturbance measured (M)
Feedback + Feedforward Control • No limitation due to • Unstable zeros of Gdy unless M has zeros at same points • Unstable poles of G and Gdy • Limitation due to • Unstable zeros of G • Extra unstable poles of Gy, but no derivative constraint • + Possible limitation due to uncertainty
FB+FF FB+FF 0.5 0.5 0.5 0.5 - 0.68 Simple Example (continued) Indirect Case Direct FB FB Stable system 0.5 0.5 Unstable system 1.5 15.35 Extra unstable pole of Gy - 51.95
Conclusions • Performance limitations • Interpolation constraint, derivative constraint • and optimal achievable performance • Indirect control vs. direct control • No additional fundamental limitation for stable plants • Unstable plants may impose disturbance sensitivity • Feedforward controller can overcome limitations • but will add sensitivity to uncertainty
Limits of Disturbance Rejection using Indirect Control Vinay Kariwala* and Sigurd Skogestad Department of Chemical Engineering NTNU, Trondheim, Norway skoge@chemeng.ntnu.no * From Jan. 2006: Nanyang Technological University (NTU), Singapore