Download
1 / 19
190 likes | 338 Views
Computational Approach for Adjudging Feasibility of Acceptable Disturbance Rejection. Vinay Kariwala and Sigurd Skogestad Department of Chemical Engineering NTNU, Trondheim, Norway. skoge@chemeng.ntnu.no. Outline. Problem Formulation Previous work

E N D
Computational Approach for Adjudging Feasibility of Acceptable Disturbance Rejection Vinay Kariwala and Sigurd Skogestad Department of Chemical Engineering NTNU, Trondheim, Norway skoge@chemeng.ntnu.no
Outline • Problem Formulation • Previous work • L1 - optimal control approach (Practical) • Case studies • Branch and bound (Theoretical)
Process Controllability Analysis Ability to achieve acceptable control performance • Limited by plant itself, Independent of controller Useful for finding • How well the plant can be controlled? • What control structure should be selected? • Sensors, Actuators, Pairing selection • What process modifications will improve control? • Equipment sizing, Buffer tanks, Additional sensors and actuators
Disturbance Rejection Measure Is it possible to keep outputs within allowable bounds for the worst possible combination of disturbances, while keeping the manipulated variables within their physical bounds? • Flexibility (e.g. Swaney and Grossman, 1985) • Disturbance rejection measure (Skogestad and Wolff, 1992) • Operability (e.g. Georgakis et al., 2004)
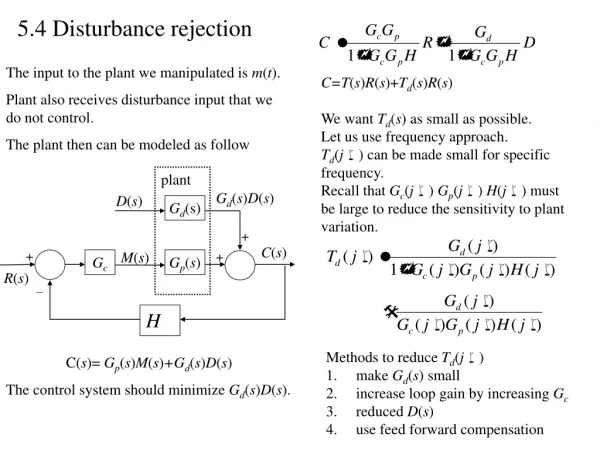
Linear time-invariant systems • Achievable with • Minimal to have • Largest with , Mathematical Formulation Skogestad and Wolff (1992), Hovd, Ma and Braatz (2003)
Previous Work Steady-state: • Hovd, Ma and Braatz (2003) • Conversion to bilinear program using duality • Solved using Baron • Kookos and Perkins (2003) • Inner minimization replaced by KKT conditions • Integer variables to handle complementarity conditions
Previous Work Frequency-wise solution: • Skogestad and Postlethwaite (1996) • SVD based necessary conditions • Hovd and Kookos (2005) • Absolute value of complex number is non-linear • Bounds by polyhedral approximations
Minimax formulation even non-causal Scales poorly Theoretical! Feedback Explicit controller Computationally attractive Practical! Disturbance Rejection using Feedback Feedback approach also provides • Upper bound for minimax formulation
Feedback Youla Parameterization a - optimal Control Annn approach Optimal for rational, causal, feedback-based linear controller
Equivalent problem (simple algebra) • - Bound each element : • - Sum of rows of: • Standard linear program • Vectorize as Conversion of to standard LP Annn approach: Steady-state
Absolute value of complex number is non-linear Polyhedral approximation (Hovd and Kookos, 2005) Semi-definite program Still Convex! Used in approach Annn approach : Frequency-wise
constraints variables Annn approach : Dynamic System • Continuous-time formulation • Difficult to compute -norm • Formulation using bounds - highly conservative • Discrete-time formulation • Finite impulse response models of order N • Increase order of Q (NQ) until convergence • Standard LP (same as steady-state) with
Summary approach: • Exact solutions for practical (feedback) cases • Steady-state • Frequency-wise • Dynamic Case (discrete time) • Upper bound for minimax (non-causal) formulation
Example 1: Blown Film Extruder • - circulant, steady-state • is parameterized by (spatial correlation) • Hovd, Ma and Braatz (2003) - bilinear formulation Achievable Output Error Bilinear (Non-Causal) aaann (Feedback) Case 0.783 0.783 0.935 0.894 0.382 0.409
Non-Causal (Hovd and Kookos, 2005) Upper bound Lower bound (upper bound on solution using minimax formulation) Example 2: Fluid Catalytic Cracker • Process: transfer matrices • Steady-state: Perfect control possible • Frequency-wise computation
Input bound Time delay Unstable zero Example 3: Dynamic system • Interpolation constraint: • Useful for avoiding unstable pole-zero cancellation • Explicit consideration unnecessary as u is bounded
Exact solution using branch and bound • Branch on • Upper bound using approach • Tightening of upper bound using divide and conquer • Lower bound using worst-case d for approach Branch and Bound • approach provides practical solution • Minimax formulation – theoretical interest • Blown film extruder (16384 options for d) • Optimal solution by resolving 6, 45 and 47 nodes
Conclusions • Disturbance rejection measure • Minimax formulation • Theoretical interest – can be non-causal • Previous work – scales poorly • approach • Practical controllability analysis • Exact solutions for steady-state, frequency-wise and dynamic (discrete time) cases • Computationally efficient • Efficient theoretical solution using Branch and bound
Computational Approach for Adjudging Feasibility of Acceptable Disturbance Rejection Vinay Kariwala and Sigurd Skogestad Department of Chemical Engineering NTNU, Trondheim, Norway kariwala,skoge@chemeng.ntnu.no