Download
1 / 15
150 likes | 274 Views
Design of Disturbance Rejection Controllers for a Magnetic Suspension System. By: Jon Dunlap Advisor: Dr. Winfred K.N. Anakwa Bradley University December 6, 2005. Multiple Controllers for Multiple Disturbances Created In Simulink xPC Target Box Serving as “Controller Container”. Summary.

E N D
Design of Disturbance Rejection Controllers for a Magnetic Suspension System By: Jon Dunlap Advisor: Dr. Winfred K.N. Anakwa Bradley University December 6, 2005
Multiple Controllers for Multiple Disturbances Created In Simulink xPC Target Box Serving as “Controller Container” Summary • Minimize Steady-State Error, Overshoot and Setting Time • Develop Controller Switching Method
Summary • Goals • Functional Description • Block Diagram • Datasheet • Preliminary Lab Work • Schedule of Tasks • Additional Goals
Previous Work Classical Controller Without Rejection Works With Step To Do Multiple Controllers For Various Inputs Use Internal Model Principle Automatic Controller Selection Goals
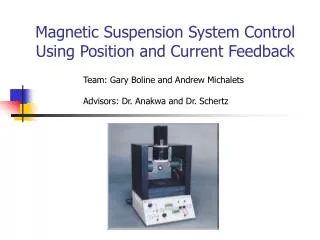
Functional Description • Host PC using Simulink and xPC software • xPC Target Box with Controllers • Magnetic Suspension System
Block Diagram • Magnetic Suspension System • xPC Target Box
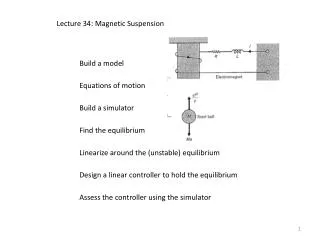
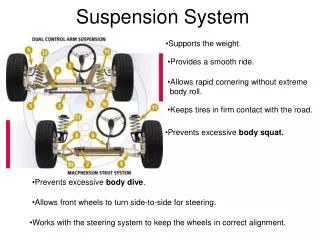
Control and Disturbance Drives Current Current Induces Magnetic Field Field Suspends Ball Sensor Translates Location into Voltage Magnetic Suspension System
xPC Target Box and Host PC • Using ±10 V ADC and DAC • Download Controllers, Upload Commands • Process Position Data and Passes Control
Disturbance Classes Step Ramp Sinusoidal Square – Triangular Steady-State Error 50mv % Overshoot 18% Settling Time 60ms Datasheet Previous Work Shows “Useable” Values
Preliminary Lab Work • Disturbance Classes with Plant SS Equations • Using Controller Canonical Form
Preliminary Lab Work • Tested Classical Controller With Disturbance • Researched Internal Model Principle with Disturbance Rejection Focus
Major Tasks List • Utilize Internal Model Principle To Design Controllers • Implement Controllers In Simulink • Process Simulink Controllers On xPC Target Box • Fine Tune Controllers To Optimize Stability Specifications
12/8/2005 - 1/15/2006 Develop Paper Controllers Implement Controllers In Simulink 1/19/2006 - 2/9/2006 Research xPC Implementation Test Controllers on MSS Fine Tune Controllers 2/16/2006 - 3/9/2006 Continue Development of Additional Controllers Documentation of Controller Methods Research Disturbance Detection Methods 3/11/2006 - 3/19/2006 Spring Break Begin Final Presentation Schedule Of Tasks
Additional Goals • Design Disturbance Detection Hardware/Software For Automation Of Controller Usage • Simulink using FFT • Determine Maximum Time Delay Allowable for Stability • Implement on xPC?