Download
1 / 13
130 likes | 657 Views
Human Finger Muscle-Tendon System. by Jared Wood Department of Mechanical Engineering University of Utah. Basic Anatomy. 4 Bones : 1 metacarpal, 3 phalanges 3 Joints : MCP (metacarpophalangeal), PIP (proximal interphalangeal), DIP (distal interphalangeal)

E N D
Human Finger Muscle-Tendon System by Jared Wood Department of Mechanical Engineering University of Utah
Basic Anatomy • 4 Bones: 1 metacarpal, 3 phalanges • 3 Joints: MCP (metacarpophalangeal), PIP (proximal interphalangeal), DIP (distal interphalangeal) • 3 Intrinsic Muscles: 2 interosseous, 1 lumbrical • 3 Extrinsic Muscles via Tendons: EDC (extensor digitorum communis), FDS (flexor digitorum superficialis), FDP (flexor digitorum profundus)
Basic Anatomy Diagram From CMU Institute of Robotics
Constraining Anatomy • Triangular Ligament • Retinacular Ligament • Interosseous Hood • Transverse Metacarpal Ligament • Sagittal Band • Synovial and Fibrous Sheaths
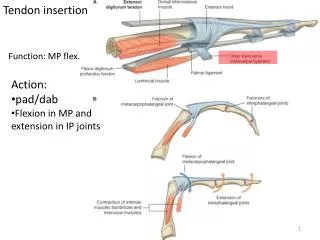
Extensor Mechanism 1 • EDC: minor insertion into base of P1; through P1 branches into 1 medial, 2 lateral bands • Medial band inserts into base of P2 • Lateral bands drop to sides of joint and then converge to insert into base of P3 • Interossei: originate on both sides of the finger, near MCP joint; each branches into 1 medial, 1 lateral bands • Medial bands converge together with the medial EDC band to insert into the base of P2 • Each lateral band converges with its lateral EDC partner • Lateral bands converge together with lateral EDC partners to insert into base of P3
Extensor Mechanism 2 • Triangular Ligament: 1)limits displacement, 2)unites lateral bands • Retinacular Ligament: 1)prevents lateral bands from sliding toward midline during extension, 2)prevents hyperextension of PIP joint, 3)when PIP joint flexed, pulls lateral bands to both sides of joint • Interosseous Hood: 1)connects interosseous tendons through P1 (first phalanx) • Sagittal Band: 1)prevents EDC from deviating off midline
Extensor Mechanism Diagram From R Tubiana’s The Hand
Flexor Mechanism 1 • FDS: inserts into P2 • FDP: inserts into P3 * FDS starts superficial to (on top of) FDP; FDP splits near P2 where at FDS submerges and inserts into P2; FDP branches then converge to insert into P3
Flexor Mechanism 2 • Synovial Sheaths: 1)encase flexor tendons, 2)thin layer of synovial fluid provides nutrition and enables excellent gliding of the tendons • Fibrous Sheaths: 1)act with synovial sheaths, 2)kept from diverging from the phalanges, especially at the axes of the digits
Lumbrical • NO bony insertion—proximal insertion on FDP near MCP joint and insertion on interosseous near interosseous divergence * Makes NO contribution to formation of interosseous hood! • Possible importance in control of tension between flexor and extensor systems • Possible importance in detail hand movement • 3 Basic Actions: • Extends IP joints WHATEVER the position of the MCP joint • Plays NO part in flexion of MCP joint! • PROBABLY plays part in side-to-side and rotation of finger
Extension • EDC: mainly extends P1, but partially extends P2; could only extend P3 if it were to detach from P1 • Interossei: with EDC contracted, interossei extend P2, P3
Flexion • FDP: provides main flexion of P2, P3 * FDS: inactive in unopposed flexion; activates when greater force required • Interossei: when EDC is relaxed, interossei flex P1 (enhanced by incorporation of interosseous hood which raps around P1)
Flexion Movement • FDP and EDC contract at onset of flexion • EDC progressively relaxes to allow flexion of MCP joint; EDC acts as brake throughout flexion • Interossei contract secondarily (after start of EDC relaxation) to flex MCP joint * For unopposed flexion, FDS and lumbrical do not contract * Since EDC contracts with FDP at onset of flexion, PIP joint is first to flex; PIP flexion causes tension in interosseous hood, which advances interosseous hood and enables interossei to start flexion of MCP joint